#include "Algorithm.h"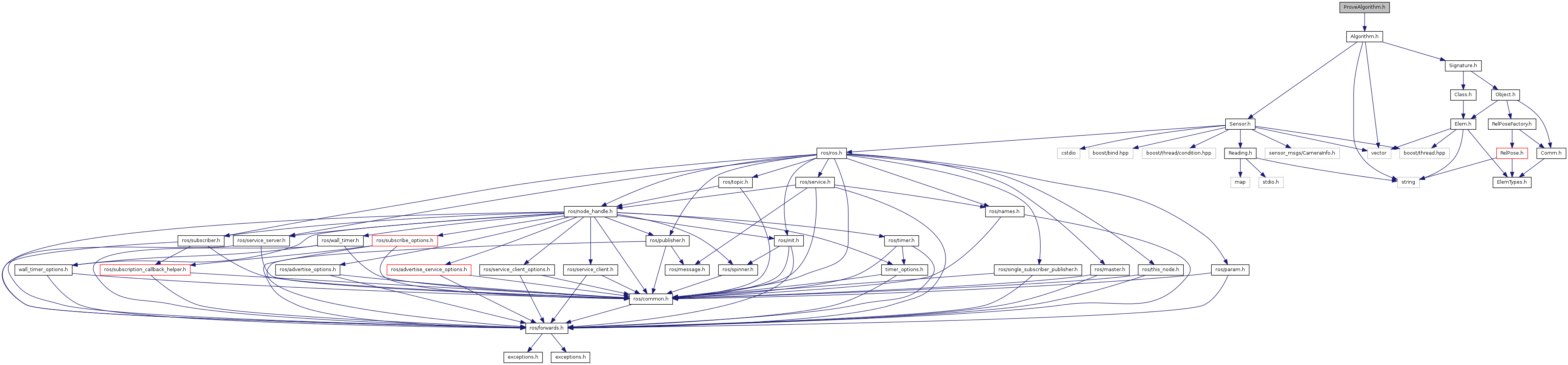

Go to the source code of this file.
Classes | |
| class | cop::ProveAlgorithm |
| gives a verification of an earlier measurement More... | |
Namespaces | |
| namespace | cop |
all functionality of the project cognitive perception is in the cop namespace Have a closer look to the interfaces that are provided by cognitive_perception: | |
Defines | |
| #define | XML_NODE_PRASP "ProveShapevsDescr" |
Typedefs | |
| typedef std::pair< RelPose *, Probability_1D_t > | cop::ImprovedPose |
| #define XML_NODE_PRASP "ProveShapevsDescr" |
Definition at line 24 of file ProveAlgorithm.h.

