Aseba is an event-based robot framework that allows distributed control and efficient resources exploitation of multi microcontrollers mobile robots. Aseba provides hardware modularity, better efficiency, and improved scalability by embedding a lightweight virtual machine in each microcontroller and providing an Integrated Development Environment to develop and debug the whole robot from a single place.
A short presentation is available at http://stephane.magnenat.net/data/aseba-presentation.pdf and a 6 pages article at http://stephane.magnenat.net/data/aseba-iros2007-workshop.pdf .
For more informations about Aseba, please have a look at its homepage at http://mobots.epfl.ch/aseba.html .
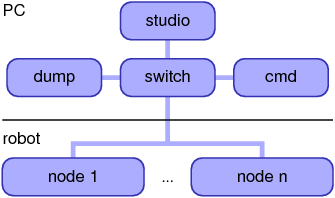
This figure shows a high level scheme of the architecture. It consists of the following modules:
In addition, there are Constants and types common to all subsystems and General helper functions and classes.
In this Developer Preview, the robot is simulated using the Enki simulator (http://home.gna.org/enki). We provide Enki in this package.
This Developer Preview uses cmake (http://www.cmake.org) and Qt 4 (http://trolltech.com/products/qt). To compile it on Unix, type:
cmake .
and then
make
in Aseba top level directory. On Windows, cmake comes with a GUI. For more informations on cmake, please refer to its manual.
To test aseba, first launch the switch:
switch/asebaswitch
Then the Enki simulator:
enki/asebaenki
Then studio, the IDE:
studio/asebastudio
You can then open enki/marxbot-obstacle-avoidance.aesl from studio.
You can rotate the 3D view by moving mouse while pressing right button. You can move the 3D view by moving mouse while pressing right button and shift. You can change the height in the 3D view by moving mouse wheel while pressing shift.

