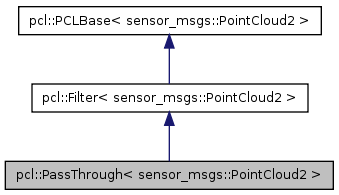
PassThrough uses the base Filter class methods to pass through all data that satisfies the user given constraints. More...
#include <passthrough.h>
Public Member Functions | |
| bool | getKeepOrganized () |
| PassThrough () | |
| Empty constructor. | |
| void | setKeepOrganized (bool val) |
| Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. By default, points are removed. | |
| void | setUserFilterValue (float val) |
| Provide a value that the filtered points should be set to instead of removing them. Used in conjunction with setKeepOrganized (). | |
Protected Member Functions | |
| void | applyFilter (PointCloud2 &output) |
| Abstract filter method. | |
Private Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud2::ConstPtr | PointCloud2ConstPtr |
| typedef PointCloud2::Ptr | PointCloud2Ptr |
Private Attributes | |
| bool | keep_organized_ |
| Keep the structure of the data organized, by setting the filtered points to the a user given value (NaN by default). | |
| float | user_filter_value_ |
| User given value to be set to any filtered point. Casted to the correct field type. | |
PassThrough uses the base Filter class methods to pass through all data that satisfies the user given constraints.
Definition at line 115 of file passthrough.h.
typedef sensor_msgs::PointCloud2 pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2 [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 117 of file passthrough.h.
typedef PointCloud2::ConstPtr pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2ConstPtr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 119 of file passthrough.h.
typedef PointCloud2::Ptr pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2Ptr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 118 of file passthrough.h.
| pcl::PassThrough< sensor_msgs::PointCloud2 >::PassThrough | ( | ) | [inline] |
Empty constructor.
Definition at line 123 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::applyFilter | ( | PointCloud2 & | output | ) | [protected, virtual] |
Abstract filter method.
The implementation needs to set output.{data, row_step, point_step, width, height, is_dense}.
Implements pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 45 of file passthrough.cpp.
| bool pcl::PassThrough< sensor_msgs::PointCloud2 >::getKeepOrganized | ( | ) | [inline] |
Definition at line 139 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setKeepOrganized | ( | bool | val | ) | [inline] |
Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. By default, points are removed.
| val | set to true whether the filtered points should be kept and set to a given user value (default: NaN) |
Definition at line 137 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setUserFilterValue | ( | float | val | ) | [inline] |
Provide a value that the filtered points should be set to instead of removing them. Used in conjunction with setKeepOrganized ().
| val | the user given value that the filtered point dimensions should be set to |
Definition at line 146 of file passthrough.h.
bool pcl::PassThrough< sensor_msgs::PointCloud2 >::keep_organized_ [private] |
Keep the structure of the data organized, by setting the filtered points to the a user given value (NaN by default).
Definition at line 154 of file passthrough.h.
float pcl::PassThrough< sensor_msgs::PointCloud2 >::user_filter_value_ [private] |
User given value to be set to any filtered point. Casted to the correct field type.
Definition at line 158 of file passthrough.h.

