FPFHEstimation estimates the Fast Point Feature Histogram (FPFH) descriptor for a given point cloud dataset containing points and normals. More...
#include <fpfh.h>
Public Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| bool | computePairFeatures (const pcl::PointCloud< PointInT > &cloud, const pcl::PointCloud< PointNT > &normals, int p_idx, int q_idx, float &f1, float &f2, float &f3, float &f4) |
| Compute the 4-tuple representation containing the three angles and one distance between two points represented by Cartesian coordinates and normals. | |
| void | computePointSPFHSignature (const pcl::PointCloud< PointInT > &cloud, const pcl::PointCloud< PointNT > &normals, int p_idx, const std::vector< int > &indices, Eigen::MatrixXf &hist_f1, Eigen::MatrixXf &hist_f2, Eigen::MatrixXf &hist_f3) |
| Estimate the SPFH (Simple Point Feature Histograms) individual signatures of the three angular (f1, f2, f3) features for a given point based on its spatial neighborhood of 3D points with normals. | |
| FPFHEstimation () | |
| Empty constructor. | |
| void | getNrSubdivisions (int &nr_bins_f1, int &nr_bins_f2, int &nr_bins_f3) |
| Get the number of subdivisions for each angular feature interval. | |
| void | setIndices (const IndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| void | setNrSubdivisions (int nr_bins_f1, int nr_bins_f2, int nr_bins_f3) |
| Set the number of subdivisions for each angular feature interval. | |
| void | weightPointSPFHSignature (const Eigen::MatrixXf &hist_f1, const Eigen::MatrixXf &hist_f2, const Eigen::MatrixXf &hist_f3, const std::vector< int > &indices, const std::vector< float > &dists, Eigen::VectorXf &fpfh_histogram) |
| Weight the SPFH (Simple Point Feature Histograms) individual histograms to create the final FPFH (Fast Point Feature Histogram) for a given point based on its 3D spatial neighborhood. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the Fast Point Feature Histograms (FPFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod (). | |
Protected Attributes | |
| Eigen::MatrixXf | hist_f1_ |
| Placeholder for the f1 histogram. | |
| Eigen::MatrixXf | hist_f2_ |
| Placeholder for the f2 histogram. | |
| Eigen::MatrixXf | hist_f3_ |
| Placeholder for the f3 histogram. | |
| int | nr_bins_f1_ |
| The number of subdivisions for each angular feature interval. | |
| int | nr_bins_f2_ |
| int | nr_bins_f3_ |
Private Attributes | |
| float | d_pi_ |
| Float constant = 1.0 / (2.0 * M_PI). | |
| Eigen::VectorXf | fpfh_histogram_ |
| Placeholder for a point's FPFH signature. | |
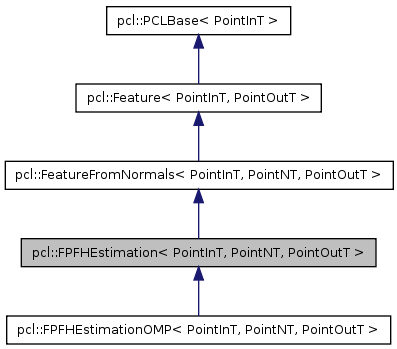
FPFHEstimation estimates the Fast Point Feature Histogram (FPFH) descriptor for a given point cloud dataset containing points and normals.
Definition at line 69 of file fpfh.h.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Reimplemented in pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >.
| pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::FPFHEstimation | ( | ) | [inline] |
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [inline, protected, virtual] |
Estimate the Fast Point Feature Histograms (FPFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ().
| output | the resultant point cloud model dataset that contains the FPFH feature estimates |
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >.
| bool pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::computePairFeatures | ( | const pcl::PointCloud< PointInT > & | cloud, | |
| const pcl::PointCloud< PointNT > & | normals, | |||
| int | p_idx, | |||
| int | q_idx, | |||
| float & | f1, | |||
| float & | f2, | |||
| float & | f3, | |||
| float & | f4 | |||
| ) | [inline] |
Compute the 4-tuple representation containing the three angles and one distance between two points represented by Cartesian coordinates and normals.
| cloud | the dataset containing the XYZ Cartesian coordinates of the two points | |
| normals | the dataset containing the surface normals (assuming normalized vectors) at each point in cloud | |
| p_idx | the index of the first point (source) | |
| q_idx | the index of the second point (target) | |
| f1 | the first angular feature (angle between the projection of nq_idx and u) | |
| f2 | the second angular feature (angle between nq_idx and v) | |
| f3 | the third angular feature (angle between np_idx and |p_idx - q_idx|) | |
| f4 | the distance feature (p_idx - q_idx) |
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::computePointSPFHSignature | ( | const pcl::PointCloud< PointInT > & | cloud, | |
| const pcl::PointCloud< PointNT > & | normals, | |||
| int | p_idx, | |||
| const std::vector< int > & | indices, | |||
| Eigen::MatrixXf & | hist_f1, | |||
| Eigen::MatrixXf & | hist_f2, | |||
| Eigen::MatrixXf & | hist_f3 | |||
| ) | [inline] |
Estimate the SPFH (Simple Point Feature Histograms) individual signatures of the three angular (f1, f2, f3) features for a given point based on its spatial neighborhood of 3D points with normals.
| cloud | the dataset containing the XYZ Cartesian coordinates of the two points | |
| normals | the dataset containing the surface normals at each point in cloud | |
| p_idx | the index of the query point (source) | |
| indices | the k-neighborhood point indices in the dataset | |
| hist_f1 | the resultant SPFH histogram for feature f1 | |
| hist_f2 | the resultant SPFH histogram for feature f2 | |
| hist_f3 | the resultant SPFH histogram for feature f3 |
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::getNrSubdivisions | ( | int & | nr_bins_f1, | |
| int & | nr_bins_f2, | |||
| int & | nr_bins_f3 | |||
| ) | [inline] |
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::setIndices | ( | const IndicesConstPtr & | indices | ) | [inline] |
Provide a pointer to the vector of indices that represents the input data.
| indices | a pointer to the vector of indices that represents the input data. |
Reimplemented from pcl::PCLBase< PointInT >.
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::setNrSubdivisions | ( | int | nr_bins_f1, | |
| int | nr_bins_f2, | |||
| int | nr_bins_f3 | |||
| ) | [inline] |
Set the number of subdivisions for each angular feature interval.
| nr_bins_f1 | number of subdivisions for the first angular feature | |
| nr_bins_f2 | number of subdivisions for the second angular feature | |
| nr_bins_f3 | number of subdivisions for the third angular feature |
| void pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::weightPointSPFHSignature | ( | const Eigen::MatrixXf & | hist_f1, | |
| const Eigen::MatrixXf & | hist_f2, | |||
| const Eigen::MatrixXf & | hist_f3, | |||
| const std::vector< int > & | indices, | |||
| const std::vector< float > & | dists, | |||
| Eigen::VectorXf & | fpfh_histogram | |||
| ) | [inline] |
Weight the SPFH (Simple Point Feature Histograms) individual histograms to create the final FPFH (Fast Point Feature Histogram) for a given point based on its 3D spatial neighborhood.
| hist_f1 | the histogram feature vector of f1 values over the given patch | |
| hist_f2 | the histogram feature vector of f2 values over the given patch | |
| hist_f3 | the histogram feature vector of f3 values over the given patch | |
| indices | the point indices of p_idx's k-neighborhood in the point cloud | |
| dists | the distances from p_idx to all its k-neighbors | |
| fpfh_histogram | the resultant FPFH histogram representing the feature at the query point |
float pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::d_pi_ [private] |
Eigen::VectorXf pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::fpfh_histogram_ [private] |
Eigen::MatrixXf pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::hist_f1_ [protected] |
Eigen::MatrixXf pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::hist_f2_ [protected] |
Eigen::MatrixXf pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::hist_f3_ [protected] |
int pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::nr_bins_f1_ [protected] |
The number of subdivisions for each angular feature interval.
Reimplemented in pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >.
int pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::nr_bins_f2_ [protected] |
Reimplemented in pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >.
int pcl::FPFHEstimation< PointInT, PointNT, PointOutT >::nr_bins_f3_ [protected] |
Reimplemented in pcl::FPFHEstimationOMP< PointInT, PointNT, PointOutT >.

