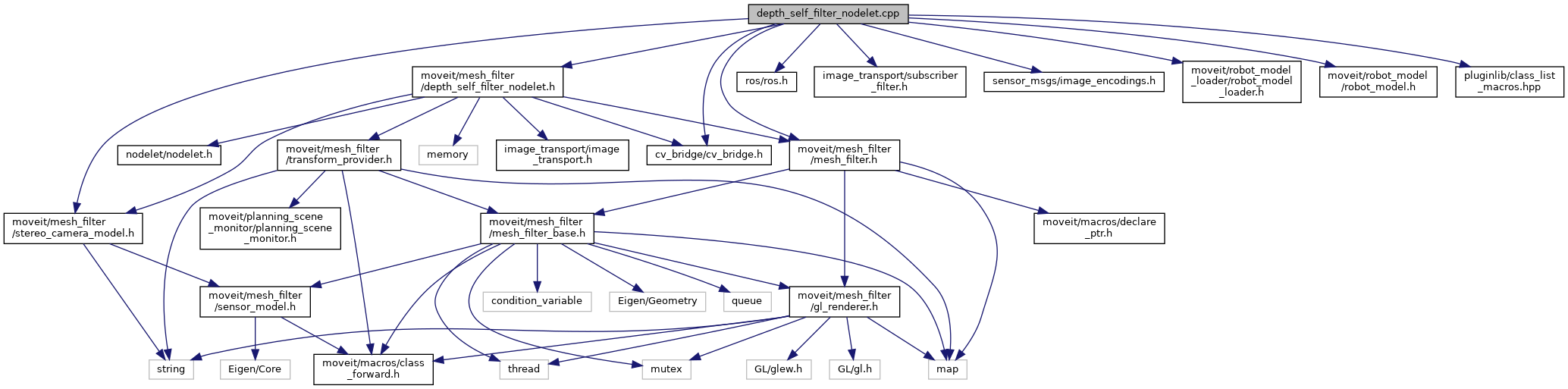
#include <moveit/mesh_filter/depth_self_filter_nodelet.h>#include <moveit/mesh_filter/stereo_camera_model.h>#include <moveit/mesh_filter/mesh_filter.h>#include <ros/ros.h>#include <image_transport/subscriber_filter.h>#include <sensor_msgs/image_encodings.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <moveit/robot_model/robot_model.h>#include <cv_bridge/cv_bridge.h>#include <pluginlib/class_list_macros.hpp>
Include dependency graph for depth_self_filter_nodelet.cpp:
Go to the source code of this file.
Variables | |
| static const std::string | LOGNAME = "depth_self_filter_nodelet" |
Variable Documentation
◆ LOGNAME
|
static |
Definition at line 48 of file depth_self_filter_nodelet.cpp.