Unit test for StereoFactor. More...
#include <gtsam/slam/StereoFactor.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/nonlinear/GaussNewtonOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/inference/Symbol.h>#include <gtsam/geometry/StereoCamera.h>#include <gtsam/geometry/Cal3_S2Stereo.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Point3.h>#include <CppUnitLite/TestHarness.h>
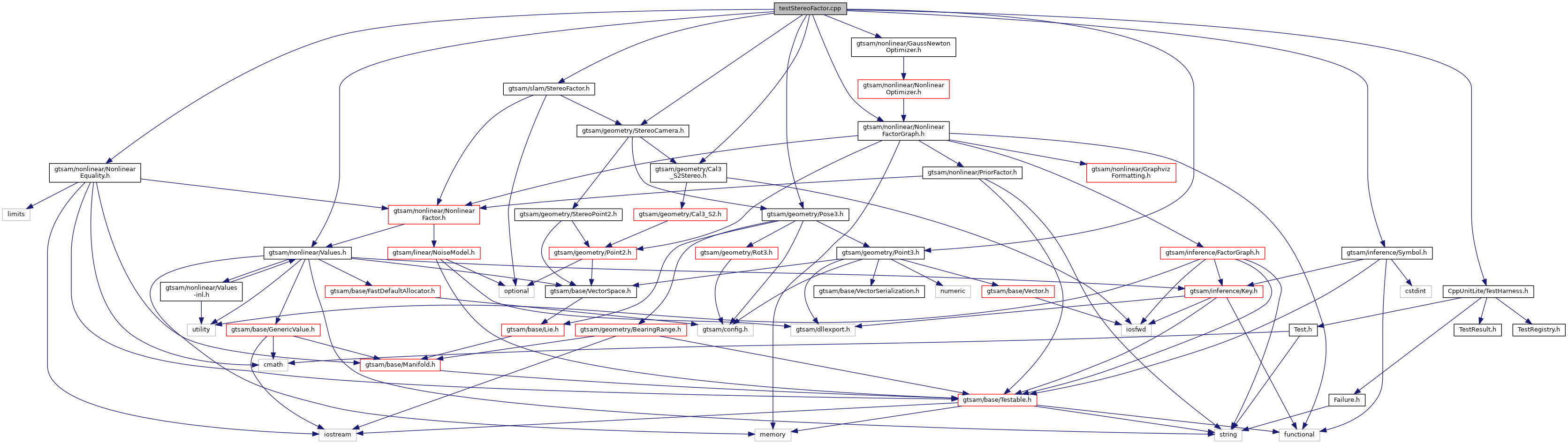
Include dependency graph for testStereoFactor.cpp:
Go to the source code of this file.
Typedefs | |
| typedef GenericStereoFactor< Pose3, Point3 > | TestStereoFactor |
Functions | |
| static std::shared_ptr< Cal3_S2Stereo > | K (new Cal3_S2Stereo(625, 625, 0, 320, 240, 0.5)) |
| int | main () |
| static SharedNoiseModel | model (noiseModel::Unit::Create(3)) |
| static Point3 | p (0, 0, 5) |
| TEST (StereoFactor, Constructor) | |
| TEST (StereoFactor, ConstructorWithTransform) | |
| TEST (StereoFactor, Equals) | |
| TEST (StereoFactor, EqualsWithTransform) | |
| TEST (StereoFactor, Error) | |
| TEST (StereoFactor, ErrorWithTransform) | |
| TEST (StereoFactor, Jacobian) | |
| TEST (StereoFactor, JacobianWithTransform) | |
| TEST (StereoFactor, singlePoint) | |
Variables | |
| static Pose3 | camera1 (Rot3(Vector3(1, -1, -1).asDiagonal()), Point3(0, 0, 6.25)) |
Detailed Description
Unit test for StereoFactor.
Definition in file testStereoFactor.cpp.
Typedef Documentation
◆ TestStereoFactor
| typedef GenericStereoFactor<Pose3, Point3> TestStereoFactor |
Definition at line 47 of file testStereoFactor.cpp.
Function Documentation
◆ K()
|
static |
◆ main()
| int main | ( | ) |
Definition at line 217 of file testStereoFactor.cpp.
◆ model()
|
static |
◆ p()
|
static |
◆ TEST() [1/9]
| TEST | ( | StereoFactor | , |
| Constructor | |||
| ) |
Definition at line 50 of file testStereoFactor.cpp.
◆ TEST() [2/9]
| TEST | ( | StereoFactor | , |
| ConstructorWithTransform | |||
| ) |
Definition at line 57 of file testStereoFactor.cpp.
◆ TEST() [3/9]
| TEST | ( | StereoFactor | , |
| Equals | |||
| ) |
Definition at line 65 of file testStereoFactor.cpp.
◆ TEST() [4/9]
| TEST | ( | StereoFactor | , |
| EqualsWithTransform | |||
| ) |
Definition at line 76 of file testStereoFactor.cpp.
◆ TEST() [5/9]
| TEST | ( | StereoFactor | , |
| Error | |||
| ) |
Definition at line 88 of file testStereoFactor.cpp.
◆ TEST() [6/9]
| TEST | ( | StereoFactor | , |
| ErrorWithTransform | |||
| ) |
Definition at line 108 of file testStereoFactor.cpp.
◆ TEST() [7/9]
| TEST | ( | StereoFactor | , |
| Jacobian | |||
| ) |
Definition at line 129 of file testStereoFactor.cpp.
◆ TEST() [8/9]
| TEST | ( | StereoFactor | , |
| JacobianWithTransform | |||
| ) |
Definition at line 156 of file testStereoFactor.cpp.
◆ TEST() [9/9]
| TEST | ( | StereoFactor | , |
| singlePoint | |||
| ) |
Definition at line 184 of file testStereoFactor.cpp.