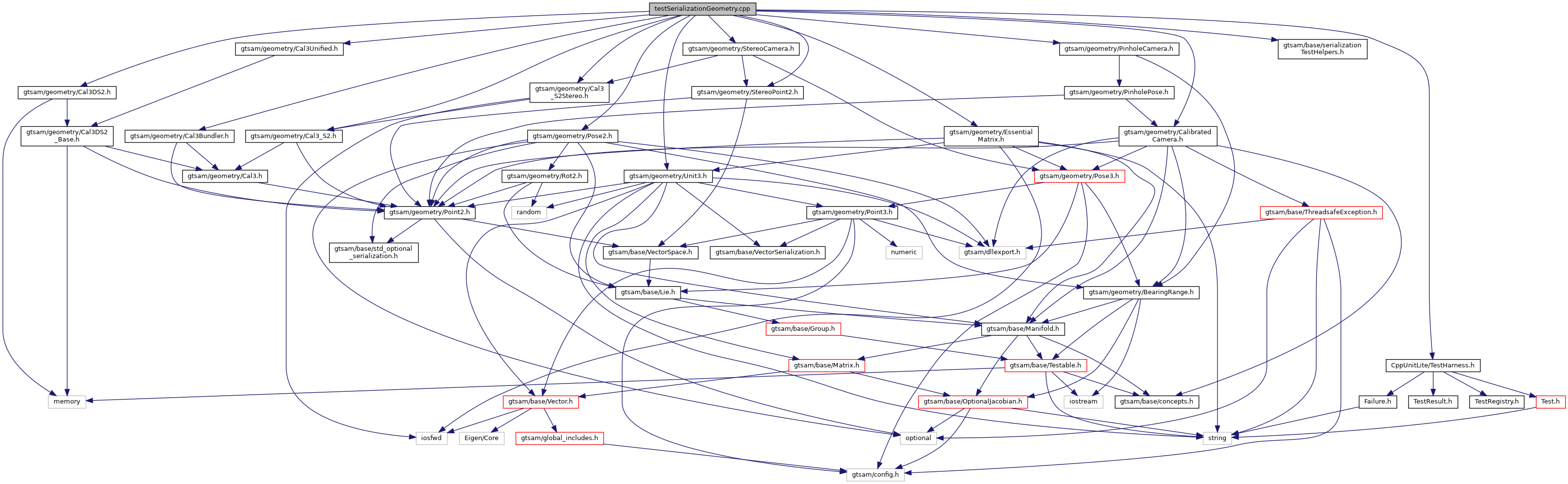
#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Unit3.h>#include <gtsam/geometry/EssentialMatrix.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/Cal3_S2Stereo.h>#include <gtsam/geometry/CalibratedCamera.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Cal3DS2.h>#include <gtsam/geometry/Cal3Bundler.h>#include <gtsam/geometry/Cal3Unified.h>#include <gtsam/geometry/StereoCamera.h>#include <gtsam/geometry/StereoPoint2.h>#include <gtsam/base/serializationTestHelpers.h>#include <CppUnitLite/TestHarness.h>
Include dependency graph for testSerializationGeometry.cpp:
Go to the source code of this file.
Functions | |
| static Cal3_S2Stereo::shared_ptr | cal4ptr (new Cal3_S2Stereo(cal4)) |
| int | main () |
| static Point3 | pt3 (1.0, 2.0, 3.0) |
| TEST (Serialization, binary_geometry) | |
| TEST (Serialization, text_geometry) | |
| TEST (Serialization, xml_geometry) | |
Variables | |
| static Cal3_S2 | cal1 (1.0, 2.0, 0.3, 0.1, 0.5) |
| static Cal3DS2 | cal2 (1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0) |
| static Cal3Bundler | cal3 (1.0, 2.0, 3.0) |
| static Cal3_S2Stereo | cal4 (1.0, 2.0, 3.0, 4.0, 5.0, 6.0) |
| static CalibratedCamera | cal5 (Pose3(rt3, pt3)) |
| static Cal3Unified | cal6 (1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0, 10.0) |
| static PinholeCamera< Cal3_S2 > | cam1 (pose3, cal1) |
| static StereoCamera | cam2 (pose3, cal4ptr) |
| static EssentialMatrix | ematrix (rt3, unit3) |
| static Pose3 | pose3 (rt3, pt3) |
| static Rot3 | rt3 = Rot3::RzRyRx(1.0, 3.0, 2.0) |
| static StereoPoint2 | spt (1.0, 2.0, 3.0) |
| static Unit3 | unit3 (1.0, 2.1, 3.4) |
Detailed Description
- Date
- Feb 7, 2012
Definition in file testSerializationGeometry.cpp.
Function Documentation
◆ cal4ptr()
|
static |
◆ main()
| int main | ( | ) |
Definition at line 133 of file testSerializationGeometry.cpp.
◆ pt3()
|
static |
◆ TEST() [1/3]
| TEST | ( | Serialization | , |
| binary_geometry | |||
| ) |
Definition at line 109 of file testSerializationGeometry.cpp.
◆ TEST() [2/3]
| TEST | ( | Serialization | , |
| text_geometry | |||
| ) |
Definition at line 60 of file testSerializationGeometry.cpp.
◆ TEST() [3/3]
| TEST | ( | Serialization | , |
| xml_geometry | |||
| ) |
Definition at line 85 of file testSerializationGeometry.cpp.
Variable Documentation
◆ cal1
|
static |
◆ cal2
|
static |
◆ cal3
|
static |
◆ cal4
|
static |
◆ cal5
|
static |
◆ cal6
|
static |
◆ cam1
|
static |
◆ cam2
|
static |
◆ ematrix
|
static |
◆ pose3
◆ rt3
|
static |
Definition at line 41 of file testSerializationGeometry.cpp.
◆ spt
|
static |
◆ unit3
|
static |