unit tests for GeneralSFMFactor More...
#include <gtsam/slam/GeneralSFMFactor.h>#include <gtsam/sam/RangeFactor.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/linear/VectorValues.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Cal3Bundler.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/base/Testable.h>#include <memory>#include <CppUnitLite/TestHarness.h>#include <iostream>#include <vector>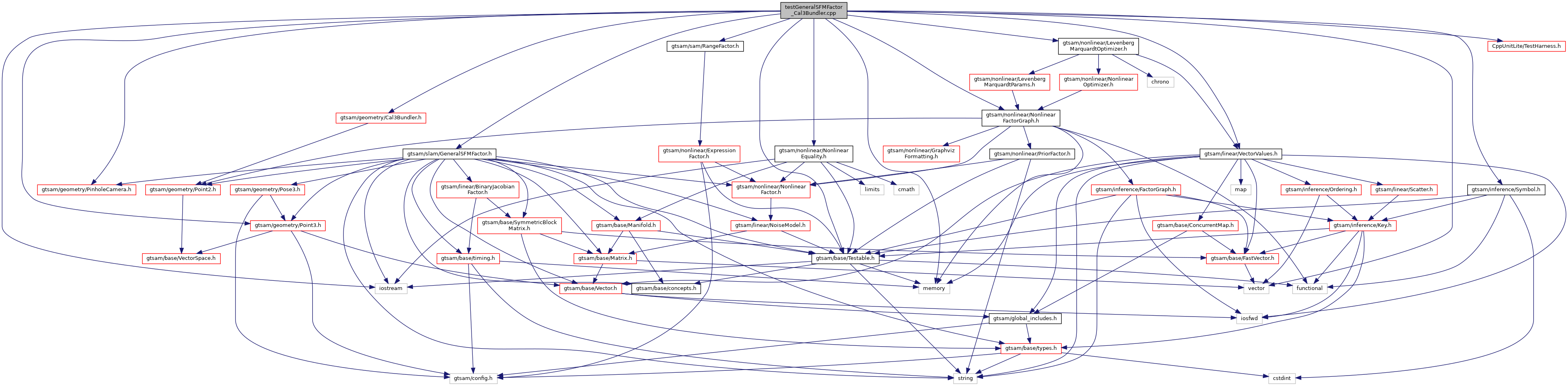
Go to the source code of this file.
Classes | |
| class | Graph |
Typedefs | |
| typedef NonlinearEquality< GeneralCamera > | CameraConstraint |
| typedef PinholeCamera< Cal3Bundler > | GeneralCamera |
| typedef NonlinearEquality< Point3 > | Point3Constraint |
| typedef GeneralSFMFactor< GeneralCamera, Point3 > | Projection |
Functions | |
| static vector< GeneralCamera > | genCameraDefaultCalibration () |
| static vector< GeneralCamera > | genCameraVariableCalibration () |
| static vector< Point3 > | genPoint3 () |
| static double | getGaussian () |
| static std::shared_ptr< Ordering > | getOrdering (const std::vector< GeneralCamera > &cameras, const std::vector< Point3 > &landmarks) |
| int | main () |
| static const SharedNoiseModel | sigma1 (noiseModel::Unit::Create(2)) |
| TEST (GeneralSFMFactor_Cal3Bundler, equals) | |
| TEST (GeneralSFMFactor_Cal3Bundler, error) | |
| TEST (GeneralSFMFactor_Cal3Bundler, optimize_defaultK) | |
| TEST (GeneralSFMFactor_Cal3Bundler, optimize_varK_BA) | |
| TEST (GeneralSFMFactor_Cal3Bundler, optimize_varK_FixCameras) | |
| TEST (GeneralSFMFactor_Cal3Bundler, optimize_varK_FixLandmarks) | |
| TEST (GeneralSFMFactor_Cal3Bundler, optimize_varK_SingleMeasurementError) | |
Variables | |
| static const double | baseline = 5. |
Detailed Description
unit tests for GeneralSFMFactor
- Date
- Dec 27, 2010
Definition in file testGeneralSFMFactor_Cal3Bundler.cpp.
Typedef Documentation
◆ CameraConstraint
Definition at line 46 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ GeneralCamera
| typedef PinholeCamera<Cal3Bundler> GeneralCamera |
Definition at line 44 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ Point3Constraint
| typedef NonlinearEquality<Point3> Point3Constraint |
Definition at line 47 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ Projection
| typedef GeneralSFMFactor<GeneralCamera, Point3> Projection |
Definition at line 45 of file testGeneralSFMFactor_Cal3Bundler.cpp.
Function Documentation
◆ genCameraDefaultCalibration()
|
static |
Definition at line 136 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ genCameraVariableCalibration()
|
static |
Definition at line 145 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ genPoint3()
|
static |
Definition at line 118 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ getGaussian()
|
static |
Definition at line 69 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ getOrdering()
|
static |
Definition at line 155 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ main()
| int main | ( | ) |
Definition at line 385 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ sigma1()
|
static |
◆ TEST() [1/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| equals | |||
| ) |
Definition at line 85 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [2/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| error | |||
| ) |
Definition at line 100 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [3/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| optimize_defaultK | |||
| ) |
Definition at line 167 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [4/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| optimize_varK_BA | |||
| ) |
Definition at line 339 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [5/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| optimize_varK_FixCameras | |||
| ) |
Definition at line 248 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [6/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| optimize_varK_FixLandmarks | |||
| ) |
Definition at line 289 of file testGeneralSFMFactor_Cal3Bundler.cpp.
◆ TEST() [7/7]
| TEST | ( | GeneralSFMFactor_Cal3Bundler | , |
| optimize_varK_SingleMeasurementError | |||
| ) |
Definition at line 206 of file testGeneralSFMFactor_Cal3Bundler.cpp.
Variable Documentation
◆ baseline
|
static |
Definition at line 115 of file testGeneralSFMFactor_Cal3Bundler.cpp.