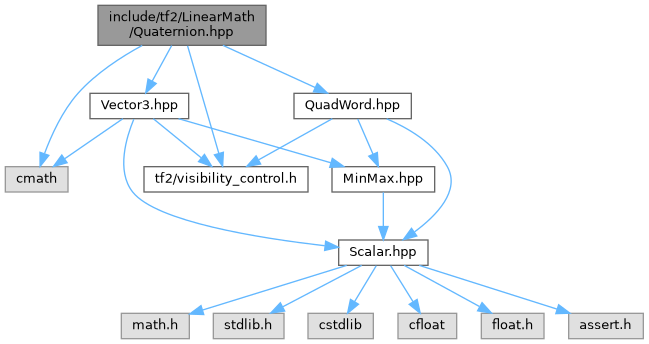
#include <cmath>
#include "Vector3.hpp"
#include "QuadWord.hpp"
#include "tf2/visibility_control.h"
Go to the source code of this file.
|
| Quaternion | tf2::operator- (const Quaternion &q) |
| | Return the negative of a quaternion.
|
| |
| Quaternion | tf2::operator* (const Quaternion &q1, const Quaternion &q2) |
| | Return the product of two quaternions.
|
| |
| Quaternion | tf2::operator* (const Quaternion &q, const Vector3 &w) |
| |
| Quaternion | tf2::operator* (const Vector3 &w, const Quaternion &q) |
| |
| tf2Scalar | tf2::dot (const Quaternion &q1, const Quaternion &q2) |
| | Calculate the dot product between two quaternions.
|
| |
| tf2Scalar | tf2::length (const Quaternion &q) |
| | Return the length of a quaternion.
|
| |
| tf2Scalar | tf2::angle (const Quaternion &q1, const Quaternion &q2) |
| | Return the half angle between two quaternions.
|
| |
| tf2Scalar | tf2::angleShortestPath (const Quaternion &q1, const Quaternion &q2) |
| | Return the shortest angle between two quaternions.
|
| |
| Quaternion | tf2::inverse (const Quaternion &q) |
| | Return the inverse of a quaternion.
|
| |
| Quaternion | tf2::slerp (const Quaternion &q1, const Quaternion &q2, const tf2Scalar &t) |
| | Return the result of spherical linear interpolation between two quaternions.
|
| |
| Vector3 | tf2::quatRotate (const Quaternion &rotation, const Vector3 &v) |
| |
| Quaternion | tf2::shortestArcQuat (const Vector3 &v0, const Vector3 &v1) |
| |
| Quaternion | tf2::shortestArcQuatNormalize2 (Vector3 &v0, Vector3 &v1) |
| |