Detailed Description
Engineering units navigation message abstraction.
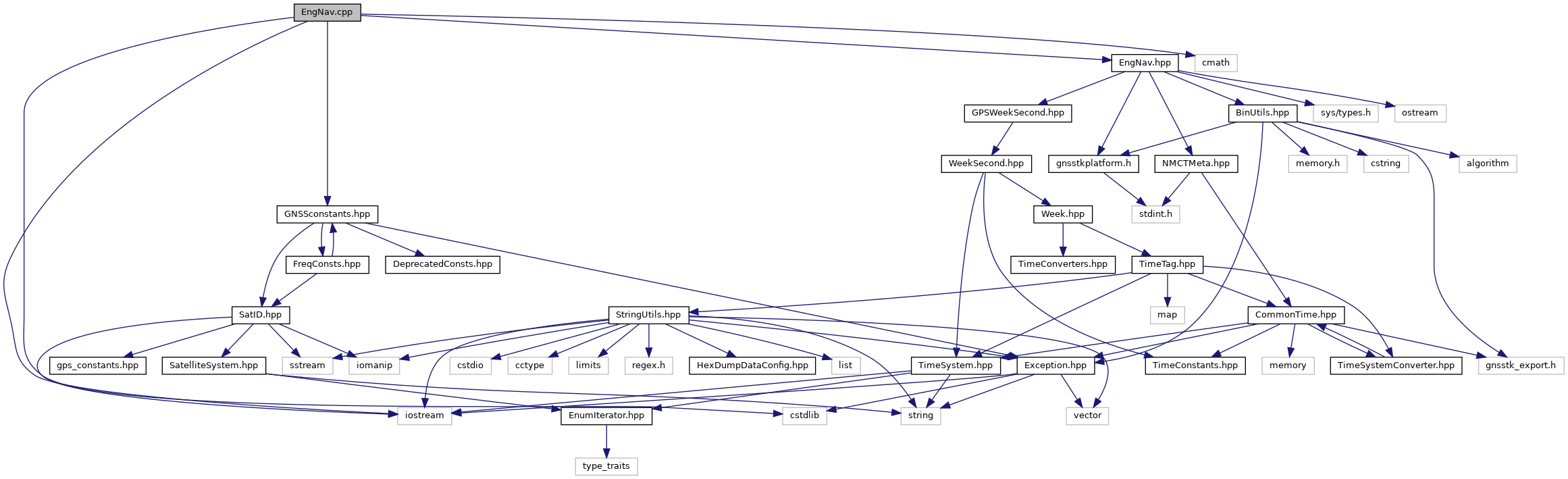
Definition in file EngNav.cpp.
#include <cstdlib>#include <iostream>#include <cmath>#include "EngNav.hpp"#include "GNSSconstants.hpp"
Include dependency graph for EngNav.cpp:
Go to the source code of this file.
Classes | |
| struct | gnsstk::DecodeBits |
| DecodeBits . More... | |
| struct | gnsstk::DecodeQuant |
Namespaces | |
| gnsstk | |
| For Sinex::InputHistory. | |
Macros | |
| #define | LDEXP(x, y) std::ldexp(x,y) |
Variables | |
| static short | gnsstk::LIMIT [] = { 127, 511 } |
| static double | gnsstk::PItab [7] |
| Table of powers of PI, initialized in EngNav(). More... | |
| static short | gnsstk::RANGE [] = { 256, 1024 } |
| static std::vector< std::vector< DecodeQuant > > | gnsstk::subframeListFoo |
Macro Definition Documentation
◆ LDEXP
Definition at line 53 of file EngNav.cpp.