Header file of bridge_node.cpp. More...
#include <ros/ros.h>#include <stdio.h>#include <stdlib.h>#include <thread>#include <iostream>#include <unistd.h>#include <string>#include <zmqpp/zmqpp.hpp>#include "ros_sub_pub.hpp"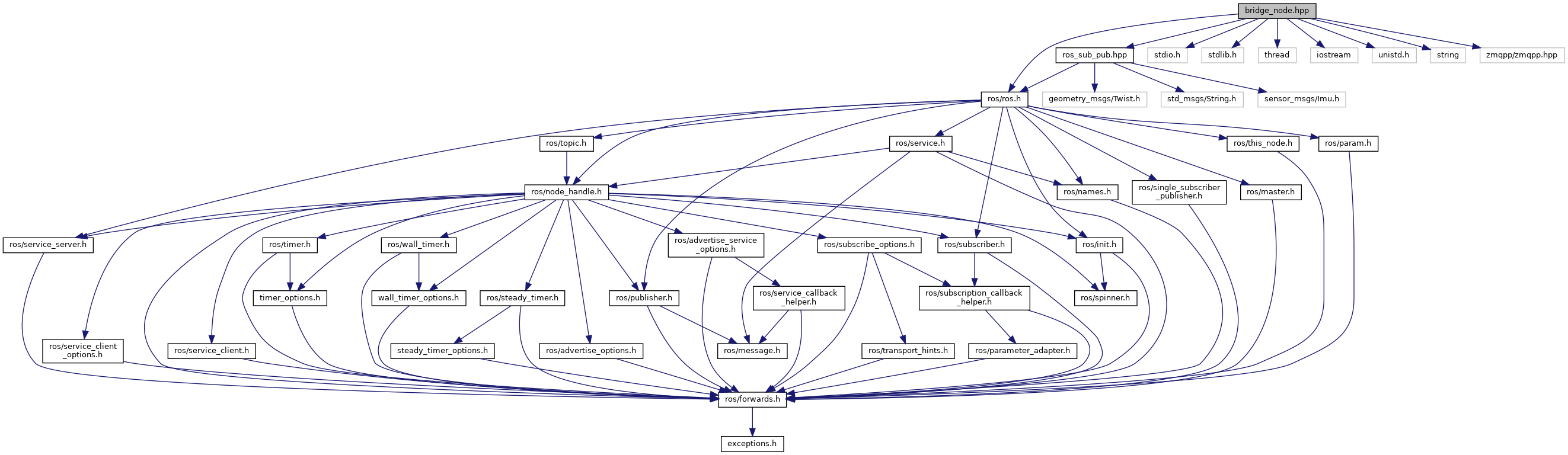
Go to the source code of this file.
Classes | |
| struct | TopicInfo |
Functions | |
| void | recv_func (int i) |
| bool | send_freq_control (int i) |
| void | stop_recv (int i) |
| void | stop_send (int i) |
Variables | |
| zmqpp::context_t | context |
| std::map< std::string, std::string > | ip_map |
| XmlRpc::XmlRpcValue | ip_xml |
| int | len_recv |
| int | len_send |
| std::string | ns |
| std::vector< std::unique_ptr< zmqpp::socket > > | receivers |
| std::vector< bool > | recv_flags_last |
| std::vector< bool > | recv_thread_flags |
| std::vector< std::thread > | recv_threads |
| XmlRpc::XmlRpcValue | recv_topics_xml |
| std::vector< TopicInfo > | recvTopics |
| std::vector< int > | send_num |
| XmlRpc::XmlRpcValue | send_topics_xml |
| std::vector< std::unique_ptr< zmqpp::socket > > | senders |
| std::vector< TopicInfo > | sendTopics |
| std::vector< ros::Time > | sub_t_last |
| std::vector< ros::Publisher > | topic_pubs |
| std::vector< ros::Subscriber > | topic_subs |
Detailed Description
Header file of bridge_node.cpp.
- Version
- 1.0
- Date
- 2023-01-01
BSD 3-Clause License
- Copyright
- (c) 2023, Peixuan Shu All rights reserved.
Definition in file bridge_node.hpp.
Function Documentation
◆ recv_func()
| void recv_func | ( | int | i | ) |
Definition at line 113 of file bridge_node.cpp.
◆ send_freq_control()
| bool send_freq_control | ( | int | i | ) |
Definition at line 43 of file bridge_node.cpp.
◆ stop_recv()
| void stop_recv | ( | int | i | ) |
Definition at line 173 of file bridge_node.cpp.
◆ stop_send()
| void stop_send | ( | int | i | ) |
Definition at line 165 of file bridge_node.cpp.
Variable Documentation
◆ context
| zmqpp::context_t context |
Definition at line 60 of file bridge_node.hpp.
◆ ip_map
| std::map<std::string, std::string> ip_map |
Definition at line 54 of file bridge_node.hpp.
◆ ip_xml
| XmlRpc::XmlRpcValue ip_xml |
Definition at line 48 of file bridge_node.hpp.
◆ len_recv
| int len_recv |
Definition at line 52 of file bridge_node.hpp.
◆ len_send
| int len_send |
Definition at line 51 of file bridge_node.hpp.
◆ ns
| std::string ns |
Definition at line 47 of file bridge_node.hpp.
◆ receivers
| std::vector<std::unique_ptr<zmqpp::socket> > receivers |
Definition at line 62 of file bridge_node.hpp.
◆ recv_flags_last
| std::vector<bool> recv_flags_last |
Definition at line 75 of file bridge_node.hpp.
◆ recv_thread_flags
| std::vector<bool> recv_thread_flags |
Definition at line 74 of file bridge_node.hpp.
◆ recv_threads
| std::vector<std::thread> recv_threads |
Definition at line 76 of file bridge_node.hpp.
◆ recv_topics_xml
| XmlRpc::XmlRpcValue recv_topics_xml |
Definition at line 50 of file bridge_node.hpp.
◆ recvTopics
| std::vector<TopicInfo> recvTopics |
Definition at line 57 of file bridge_node.hpp.
◆ send_num
| std::vector<int> send_num |
Definition at line 70 of file bridge_node.hpp.
◆ send_topics_xml
| XmlRpc::XmlRpcValue send_topics_xml |
Definition at line 49 of file bridge_node.hpp.
◆ senders
| std::vector<std::unique_ptr<zmqpp::socket> > senders |
Definition at line 61 of file bridge_node.hpp.
◆ sendTopics
| std::vector<TopicInfo> sendTopics |
Definition at line 56 of file bridge_node.hpp.
◆ sub_t_last
| std::vector<ros::Time> sub_t_last |
Definition at line 69 of file bridge_node.hpp.
◆ topic_pubs
| std::vector<ros::Publisher> topic_pubs |
Definition at line 66 of file bridge_node.hpp.
◆ topic_subs
| std::vector<ros::Subscriber> topic_subs |
Definition at line 65 of file bridge_node.hpp.