Reliable TCP bridge for ros data transfer in unstable network. It will send/receive the specified ROS topics in ../config/ros_topics.yaml It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and supports 1-N pub-sub connection even with TCP protocol. More...
#include "bridge_node.hpp"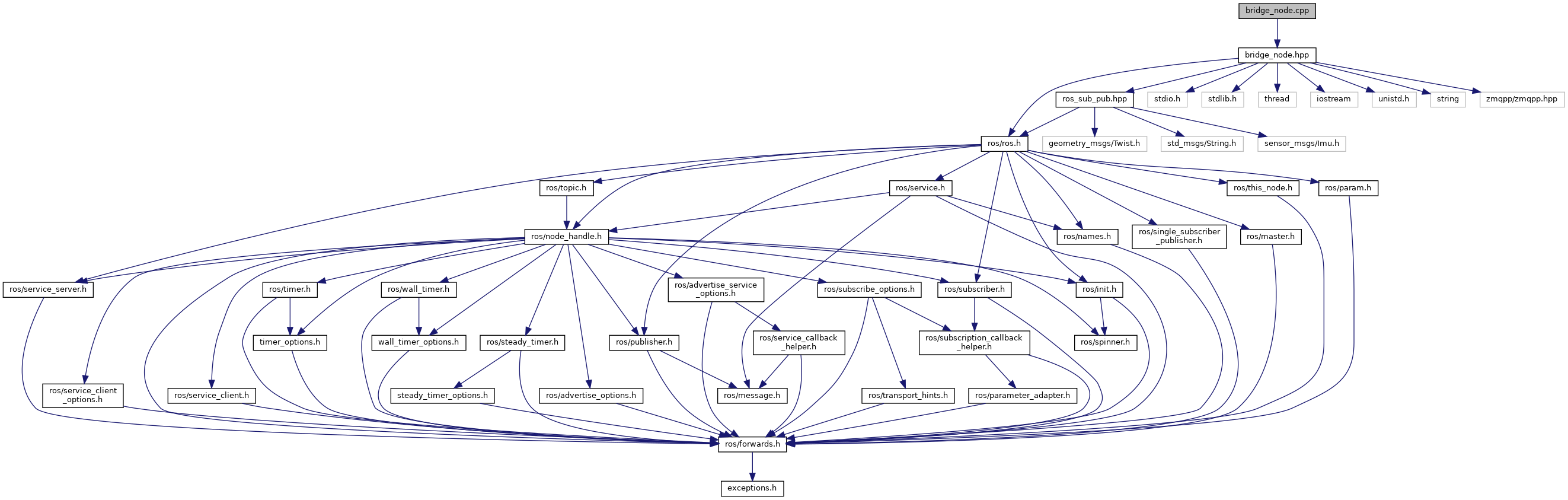
Go to the source code of this file.
Functions | |
| template<typename T > | |
| void | deserialize_pub (uint8_t *buffer_ptr, size_t msg_size, int i) |
| int | main (int argc, char **argv) |
| void | recv_func (int i) |
| bool | send_freq_control (int i) |
| void | stop_recv (int i) |
| void | stop_send (int i) |
| template<typename T , int i> | |
| void | sub_cb (const T &msg) |
Detailed Description
Reliable TCP bridge for ros data transfer in unstable network. It will send/receive the specified ROS topics in ../config/ros_topics.yaml It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and supports 1-N pub-sub connection even with TCP protocol.
Core Idea: It would create the receving thread for each receiving ROS topic and send ROS messages in each sub_cb() callback.
- Version
- 1.0
- Date
- 2023-01-01
BSD 3-Clause License
- Copyright
- (c) 2023, Peixuan Shu All rights reserved.
Definition in file bridge_node.cpp.
Function Documentation
◆ deserialize_pub()
| void deserialize_pub | ( | uint8_t * | buffer_ptr, |
| size_t | msg_size, | ||
| int | i | ||
| ) |
Definition at line 100 of file bridge_node.cpp.
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 183 of file bridge_node.cpp.
◆ recv_func()
| void recv_func | ( | int | i | ) |
Definition at line 113 of file bridge_node.cpp.
◆ send_freq_control()
| bool send_freq_control | ( | int | i | ) |
Definition at line 43 of file bridge_node.cpp.
◆ stop_recv()
| void stop_recv | ( | int | i | ) |
Definition at line 173 of file bridge_node.cpp.
◆ stop_send()
| void stop_send | ( | int | i | ) |
Definition at line 165 of file bridge_node.cpp.
◆ sub_cb()
| void sub_cb | ( | const T & | msg | ) |
Definition at line 65 of file bridge_node.cpp.