#include "sbgEComCmdSensor.h"#include <streamBuffer/sbgStreamBuffer.h>#include "transfer/sbgEComTransfer.h"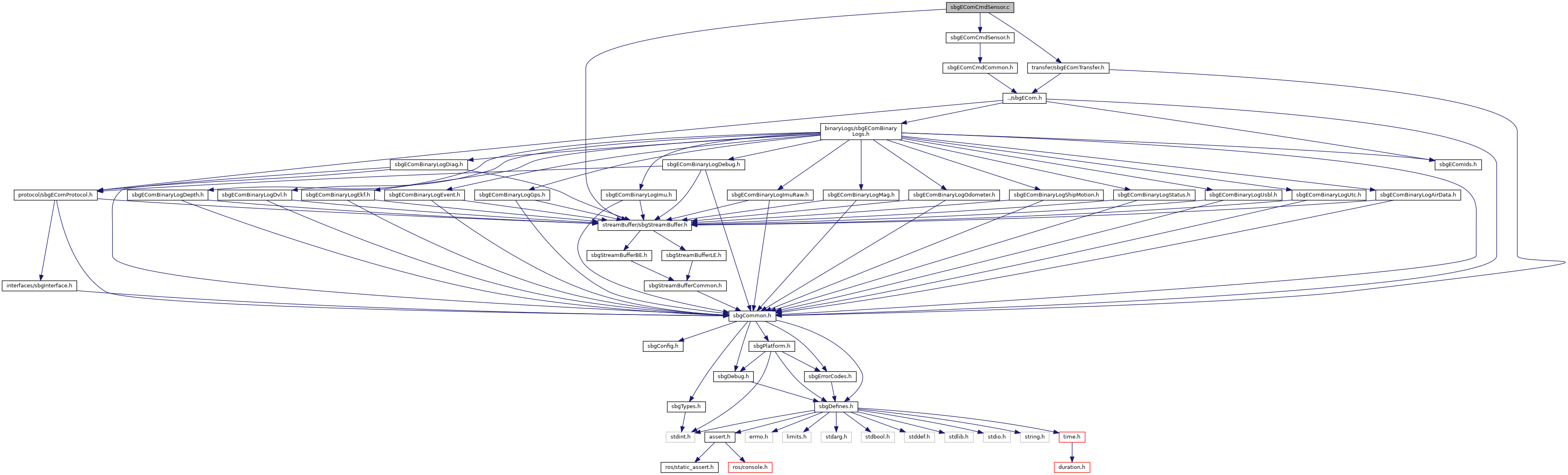
Go to the source code of this file.
Functions | |
| SbgErrorCode | sbgEComCmdSensorGetAidingAssignment (SbgEComHandle *pHandle, SbgEComAidingAssignConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorGetAlignmentAndLeverArm (SbgEComHandle *pHandle, SbgEComSensorAlignmentInfo *pAlignConf, float leverArm[3]) |
| SbgErrorCode | sbgEComCmdSensorGetInitCondition (SbgEComHandle *pHandle, SbgEComInitConditionConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorGetMotionProfileInfo (SbgEComHandle *pHandle, SbgEComModelInfo *pModelInfo) |
| SbgErrorCode | sbgEComCmdSensorSetAidingAssignment (SbgEComHandle *pHandle, const SbgEComAidingAssignConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorSetAlignmentAndLeverArm (SbgEComHandle *pHandle, const SbgEComSensorAlignmentInfo *pAlignConf, const float leverArm[3]) |
| SbgErrorCode | sbgEComCmdSensorSetInitCondition (SbgEComHandle *pHandle, const SbgEComInitConditionConf *pConf) |
| SbgErrorCode | sbgEComCmdSensorSetMotionProfileId (SbgEComHandle *pHandle, uint32_t id) |
Function Documentation
◆ sbgEComCmdSensorGetAidingAssignment()
| SbgErrorCode sbgEComCmdSensorGetAidingAssignment | ( | SbgEComHandle * | pHandle, |
| SbgEComAidingAssignConf * | pConf | ||
| ) |
Retrieve the assignment of the aiding sensors.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComAidingAssignConf to contain the current assignment of the aiding sensors.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
< Reserved fields to ignore
Definition at line 193 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetAlignmentAndLeverArm()
| SbgErrorCode sbgEComCmdSensorGetAlignmentAndLeverArm | ( | SbgEComHandle * | pHandle, |
| SbgEComSensorAlignmentInfo * | pAlignConf, | ||
| float | leverArm[3] | ||
| ) |
Retrieve the alignment and lever arm configuration of the sensor.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pAlignConf Pointer to a SbgEComSensorAlignmentInfo struct to hold alignment configuration of the sensor. [out] leverArm Pointer to a table to contain lever arm X, Y, Z components in meters.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 358 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetInitCondition()
| SbgErrorCode sbgEComCmdSensorGetInitCondition | ( | SbgEComHandle * | pHandle, |
| SbgEComInitConditionConf * | pConf | ||
| ) |
Retrieve the initial conditions settings.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComInitConditionConf to contain the current initial conditions settings.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 44 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorGetMotionProfileInfo()
| SbgErrorCode sbgEComCmdSensorGetMotionProfileInfo | ( | SbgEComHandle * | pHandle, |
| SbgEComModelInfo * | pModelInfo | ||
| ) |
Retrieve Motion profile information.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pMotionProfileInfo Pointer to a SbgEComModelInfo to contain the current motion profile info.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 30 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetAidingAssignment()
| SbgErrorCode sbgEComCmdSensorSetAidingAssignment | ( | SbgEComHandle * | pHandle, |
| const SbgEComAidingAssignConf * | pConf | ||
| ) |
Set the assignment of the aiding sensors.
- Parameters
-
[in] pHandle A valid sbgECom handle. [out] pConf Pointer to a SbgEComAidingAssignConf containing the new assignment of the aiding sensors.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 273 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetAlignmentAndLeverArm()
| SbgErrorCode sbgEComCmdSensorSetAlignmentAndLeverArm | ( | SbgEComHandle * | pHandle, |
| const SbgEComSensorAlignmentInfo * | pAlignConf, | ||
| const float | leverArm[3] | ||
| ) |
Set the alignment and lever arm configuration of the sensor.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pAlignConf Pointer to a SbgEComSensorAlignmentInfo struct holding alignment configuration for the sensor. [in] leverArm Pointer to a table containing lever arm X, Y, Z components in meters.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 437 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetInitCondition()
| SbgErrorCode sbgEComCmdSensorSetInitCondition | ( | SbgEComHandle * | pHandle, |
| const SbgEComInitConditionConf * | pConf | ||
| ) |
Set the initial condition configuration.
- Parameters
-
[in] pHandle A valid sbgECom handle. [in] pConf Pointer to a SbgEComInitConditionConf containing the new initial condition configuration.
- Returns
- SBG_NO_ERROR if the command has been executed successfully.
Definition at line 119 of file sbgEComCmdSensor.c.
◆ sbgEComCmdSensorSetMotionProfileId()
| SbgErrorCode sbgEComCmdSensorSetMotionProfileId | ( | SbgEComHandle * | pHandle, |
| uint32_t | id | ||
| ) |
Set a Motion profile ID
- Parameters
-
[in] pHandle A valid sbgECom handle.
Definition at line 15 of file sbgEComCmdSensor.c.