#include <robotis_manipulator/robotis_manipulator.h>#include <dynamixel_workbench_toolbox/dynamixel_workbench.h>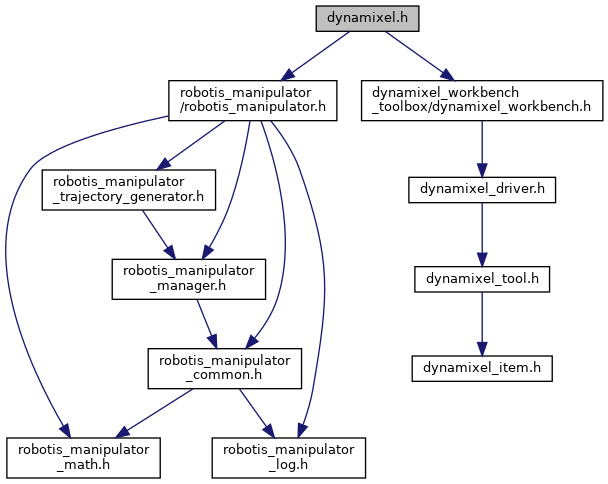
Go to the source code of this file.
Classes | |
| class | dynamixel::GripperDynamixel |
| struct | dynamixel::Joint |
| class | dynamixel::JointDynamixel |
| class | dynamixel::JointDynamixelProfileControl |
Namespaces | |
| dynamixel | |
Macros | |
| #define | ADDR_GOAL_POSITION_2 116 |
| #define | ADDR_POSITION_TRAJECTORY_2 140 |
| #define | ADDR_PRESENT_CURRENT_1 = 40; |
| #define | ADDR_PRESENT_CURRENT_2 126 |
| #define | ADDR_PRESENT_POSITION_1 = 36; |
| #define | ADDR_PRESENT_POSITION_2 132 |
| #define | ADDR_PRESENT_VELOCITY_1 = 38; |
| #define | ADDR_PRESENT_VELOCITY_2 128 |
| #define | ADDR_PROFILE_ACCELERATION_2 108 |
| #define | ADDR_PROFILE_VELOCITY_2 112 |
| #define | ADDR_VELOCITY_TRAJECTORY_2 136 |
| #define | LENGTH_GOAL_POSITION_2 4 |
| #define | LENGTH_POSITION_TRAJECTORY_2 4 |
| #define | LENGTH_PRESENT_CURRENT_1 = 2; |
| #define | LENGTH_PRESENT_CURRENT_2 2 |
| #define | LENGTH_PRESENT_POSITION_1 = 2; |
| #define | LENGTH_PRESENT_POSITION_2 4 |
| #define | LENGTH_PRESENT_VELOCITY_1 = 2; |
| #define | LENGTH_PRESENT_VELOCITY_2 4 |
| #define | LENGTH_PROFILE_ACCELERATION_2 4 |
| #define | LENGTH_PROFILE_VELOCITY_2 4 |
| #define | LENGTH_VELOCITY_TRAJECTORY_2 4 |
| #define | SYNC_READ_HANDLER_FOR_PRESENT_POSITION_VELOCITY_CURRENT 0 |
| #define | SYNC_WRITE_HANDLER 0 |
Macro Definition Documentation
◆ ADDR_GOAL_POSITION_2
| #define ADDR_GOAL_POSITION_2 116 |
Definition at line 46 of file dynamixel.h.
◆ ADDR_POSITION_TRAJECTORY_2
| #define ADDR_POSITION_TRAJECTORY_2 140 |
Definition at line 43 of file dynamixel.h.
◆ ADDR_PRESENT_CURRENT_1
| #define ADDR_PRESENT_CURRENT_1 = 40; |
Definition at line 60 of file dynamixel.h.
◆ ADDR_PRESENT_CURRENT_2
| #define ADDR_PRESENT_CURRENT_2 126 |
Definition at line 39 of file dynamixel.h.
◆ ADDR_PRESENT_POSITION_1
| #define ADDR_PRESENT_POSITION_1 = 36; |
Definition at line 62 of file dynamixel.h.
◆ ADDR_PRESENT_POSITION_2
| #define ADDR_PRESENT_POSITION_2 132 |
Definition at line 41 of file dynamixel.h.
◆ ADDR_PRESENT_VELOCITY_1
| #define ADDR_PRESENT_VELOCITY_1 = 38; |
Definition at line 61 of file dynamixel.h.
◆ ADDR_PRESENT_VELOCITY_2
| #define ADDR_PRESENT_VELOCITY_2 128 |
Definition at line 40 of file dynamixel.h.
◆ ADDR_PROFILE_ACCELERATION_2
| #define ADDR_PROFILE_ACCELERATION_2 108 |
Definition at line 44 of file dynamixel.h.
◆ ADDR_PROFILE_VELOCITY_2
| #define ADDR_PROFILE_VELOCITY_2 112 |
Definition at line 45 of file dynamixel.h.
◆ ADDR_VELOCITY_TRAJECTORY_2
| #define ADDR_VELOCITY_TRAJECTORY_2 136 |
Definition at line 42 of file dynamixel.h.
◆ LENGTH_GOAL_POSITION_2
| #define LENGTH_GOAL_POSITION_2 4 |
Definition at line 56 of file dynamixel.h.
◆ LENGTH_POSITION_TRAJECTORY_2
| #define LENGTH_POSITION_TRAJECTORY_2 4 |
Definition at line 53 of file dynamixel.h.
◆ LENGTH_PRESENT_CURRENT_1
| #define LENGTH_PRESENT_CURRENT_1 = 2; |
Definition at line 64 of file dynamixel.h.
◆ LENGTH_PRESENT_CURRENT_2
| #define LENGTH_PRESENT_CURRENT_2 2 |
Definition at line 49 of file dynamixel.h.
◆ LENGTH_PRESENT_POSITION_1
| #define LENGTH_PRESENT_POSITION_1 = 2; |
Definition at line 66 of file dynamixel.h.
◆ LENGTH_PRESENT_POSITION_2
| #define LENGTH_PRESENT_POSITION_2 4 |
Definition at line 51 of file dynamixel.h.
◆ LENGTH_PRESENT_VELOCITY_1
| #define LENGTH_PRESENT_VELOCITY_1 = 2; |
Definition at line 65 of file dynamixel.h.
◆ LENGTH_PRESENT_VELOCITY_2
| #define LENGTH_PRESENT_VELOCITY_2 4 |
Definition at line 50 of file dynamixel.h.
◆ LENGTH_PROFILE_ACCELERATION_2
| #define LENGTH_PROFILE_ACCELERATION_2 4 |
Definition at line 54 of file dynamixel.h.
◆ LENGTH_PROFILE_VELOCITY_2
| #define LENGTH_PROFILE_VELOCITY_2 4 |
Definition at line 55 of file dynamixel.h.
◆ LENGTH_VELOCITY_TRAJECTORY_2
| #define LENGTH_VELOCITY_TRAJECTORY_2 4 |
Definition at line 52 of file dynamixel.h.
◆ SYNC_READ_HANDLER_FOR_PRESENT_POSITION_VELOCITY_CURRENT
| #define SYNC_READ_HANDLER_FOR_PRESENT_POSITION_VELOCITY_CURRENT 0 |
Definition at line 34 of file dynamixel.h.
◆ SYNC_WRITE_HANDLER
| #define SYNC_WRITE_HANDLER 0 |
Definition at line 33 of file dynamixel.h.