Partial implementation of the StateFeedback interface for 1-dimensional output linear state-feedback filter types. More...
#include <state_feedback_1output.hpp>
Public Member Functions | |
| std::shared_ptr< double > & | compute (std::shared_ptr< InputStateType > &_xObs, std::shared_ptr< InputStateType > &_xDes, const double &_t) override |
| Computes the output state at the specified time instant given the observed state and the desired state. More... | |
| StateFeedback1Output & | operator= (const StateFeedback1Output &)=default |
| StateFeedback1Output & | operator= (StateFeedback1Output &&)=default |
| StateFeedback1Output (std::shared_ptr< ParamsType > _params) | |
| StateFeedback1Output (const StateFeedback1Output &)=default | |
| StateFeedback1Output (StateFeedback1Output &&)=default | |
| virtual | ~StateFeedback1Output ()=default |
 Public Member Functions inherited from tuw::StateFeedback< InputStateType, InputStateType, double, ParamsType > Public Member Functions inherited from tuw::StateFeedback< InputStateType, InputStateType, double, ParamsType > | |
| StateFeedback & | operator= (const StateFeedback &)=default |
| StateFeedback & | operator= (StateFeedback &&)=default |
| std::shared_ptr< double > & | output () |
| Access to the last computed output state. More... | |
| std::shared_ptr< ParamsType > & | params () |
| Access to the last parameters object pointer. More... | |
| virtual void | reloadParam ()=0 |
| Reloads class parameters. To be called when parameters that influence the class variables are changed. More... | |
| StateFeedback (std::shared_ptr< ParamsType > _params) | |
| StateFeedback (const StateFeedback &)=default | |
| StateFeedback (StateFeedback &&)=default | |
| virtual | ~StateFeedback ()=default |
| Public Member Functions inherited from tuw::Integrator | |
| void | integrate (const double &_dx) |
| Addds a new value to the integrated value. More... | |
| Integrator ()=default | |
| Integrator (const Integrator &)=default | |
| Integrator (Integrator &&)=default | |
| const double & | intOutput () const |
| Returns the integrator value. More... | |
| Integrator & | operator= (const Integrator &)=default |
| Integrator & | operator= (Integrator &&)=default |
| void | reset (const double &_x0) |
| resets the integrated value and compensation variable. More... | |
| virtual | ~Integrator ()=default |
Protected Attributes | |
| double | intSaturateVal_ |
| Box constraint. When output outside of it, error integration is not performed. More... | |
| double | kInt_ |
| gain of the integrated error More... | |
| Eigen::VectorXd | kX_ |
| State error gains More... | |
| size_t | outputOrder_ |
| Order of the output variable in the defined state. More... | |
| bool | reloadParamInternal_ |
| Triggers base class reconfiguration. To be set to true on any parameter change. More... | |
| Protected Attributes inherited from tuw::StateFeedback< InputStateType, InputStateType, double, ParamsType > | |
| std::shared_ptr< double > | output_ |
| Last computet output state. More... | |
| std::shared_ptr< ParamsType > | params_ |
| Pointer to the class parameters object. More... | |
Private Member Functions | |
| void | reloadParamInternal () |
| Performs class specific reconfiguration on parameters change. More... | |
Private Attributes | |
| size_t | desSize_ |
| size_t | outputOrderRelXDes_ |
| double | t_ |
| size_t | xDiffSize_ |
| Eigen::VectorXd | xDiffVec_ |
Detailed Description
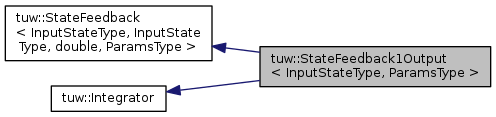
template<typename InputStateType, typename ParamsType>
class tuw::StateFeedback1Output< InputStateType, ParamsType >
Partial implementation of the StateFeedback interface for 1-dimensional output linear state-feedback filter types.
- Template Parameters
-
InputStateType Class defining the current state of the afferent system ParamType Class defining the filter parameters The class represents a generic state-feedback filter (with integrator term) for 1-dimensional output states:
Given an observed state vector ![$ \mathbf{x_{obs}} = [xo_0, xo_1, xo_2, ..., xo_n]^T $](form_0.png) , a desired state vector
, a desired state vector ![$ *\mathbf{x_{des}} = [xd_0, xd_1, xd_2,..., xd_m]^T $](form_1.png) , and a specified output order
, and a specified output order  (outputOrder_), the filter computes
(outputOrder_), the filter computes  as follows:
as follows:
![$ u = - [k_I, \mathbf{k_x}] \cdot [ e_I, \mathbf{x_{obs}}_{0..dim_{\Delta \mathbf{x}}} - *\mathbf{x_{des}}_{0..dim_{\Delta \mathbf{x}}}], \quad dim_{\Delta \mathbf{x}} = min(ord_u+1, m) $](form_4.png)
The integrator performs (numerically stable) integration on the error  . It includes anti-windup and thus integration is not performed in a cycle if the computed output
. It includes anti-windup and thus integration is not performed in a cycle if the computed output  is outside the box-constraint intSaturateVal_. Note that integration can be disabled either by setting intSaturateVal_ or
is outside the box-constraint intSaturateVal_. Note that integration can be disabled either by setting intSaturateVal_ or  to
to  .
.
If  ,
,  is set to and
is set to and  is set to
is set to  . This implies that the last state becomes feed-forward (as long as it is available and at the same order as the output order).
. This implies that the last state becomes feed-forward (as long as it is available and at the same order as the output order).
Variables that have to be manipulated by class extensions: outputOrder_, intSaturateVal_, kInt_, kX_, reloadParamInternal_.
Definition at line 71 of file state_feedback_1output.hpp.
Constructor & Destructor Documentation
|
inline |
Definition at line 75 of file state_feedback_1output.hpp.
|
virtualdefault |
|
default |
|
default |
Member Function Documentation
|
inlineoverridevirtual |
Computes the output state at the specified time instant given the observed state and the desired state.
- Parameters
-
_xObs Observed state _xDes Desired state _t Temporal evaluation point
- Returns
- computed output state
Implements tuw::StateFeedback< InputStateType, InputStateType, double, ParamsType >.
Definition at line 97 of file state_feedback_1output.hpp.
|
default |
|
default |
|
inlineprivate |
Performs class specific reconfiguration on parameters change.
Definition at line 125 of file state_feedback_1output.hpp.
Member Data Documentation
|
private |
Definition at line 154 of file state_feedback_1output.hpp.
|
protected |
Box constraint. When output outside of it, error integration is not performed.
Definition at line 145 of file state_feedback_1output.hpp.
|
protected |
gain of the integrated error
Definition at line 147 of file state_feedback_1output.hpp.
|
protected |
State error gains
Definition at line 149 of file state_feedback_1output.hpp.
|
protected |
Order of the output variable in the defined state.
Definition at line 143 of file state_feedback_1output.hpp.
|
private |
Definition at line 160 of file state_feedback_1output.hpp.
|
protected |
Triggers base class reconfiguration. To be set to true on any parameter change.
Definition at line 151 of file state_feedback_1output.hpp.
|
private |
Definition at line 163 of file state_feedback_1output.hpp.
|
private |
Definition at line 157 of file state_feedback_1output.hpp.
|
private |
Definition at line 166 of file state_feedback_1output.hpp.
The documentation for this class was generated from the following file: