CVFHEstimation estimates the Clustered Viewpoint Feature Histogram (CVFH) descriptor for a given point cloud dataset containing XYZ data and normals, as presented in: More...
#include <cvfh.h>
Public Types | |
| typedef pcl::search::Search < PointNormal >::Ptr | KdTreePtr |
| typedef pcl::NormalEstimation < PointNormal, PointNormal > | NormalEstimator |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef pcl::VFHEstimation < PointInT, PointNT, pcl::VFHSignature308 > | VFHEstimator |
Public Member Functions | |
| void | compute (PointCloudOut &output) |
| Overloaded computed method from pcl::Feature. | |
| CVFHEstimation () | |
| Empty constructor. | |
| void | filterNormalsWithHighCurvature (const pcl::PointCloud< PointNT > &cloud, std::vector< int > &indices_to_use, std::vector< int > &indices_out, std::vector< int > &indices_in, float threshold) |
| Removes normals with high curvature caused by real edges or noisy data. | |
| void | getCentroidClusters (std::vector< Eigen::Vector3f > ¢roids) |
| Get the centroids used to compute different CVFH descriptors. | |
| void | getCentroidNormalClusters (std::vector< Eigen::Vector3f > ¢roids) |
| Get the normal centroids used to compute different CVFH descriptors. | |
| void | getViewPoint (float &vpx, float &vpy, float &vpz) |
| Get the viewpoint. | |
| void | setClusterTolerance (float d) |
| Sets max. Euclidean distance between points to be added to the cluster. | |
| void | setCurvatureThreshold (float d) |
| Sets curvature threshold for removing normals. | |
| void | setEPSAngleThreshold (float d) |
| Sets max. deviation of the normals between two points so they can be clustered together. | |
| void | setMinPoints (size_t min) |
| Set minimum amount of points for a cluster to be considered. | |
| void | setNormalizeBins (bool normalize) |
| Sets wether if the CVFH signatures should be normalized or not. | |
| void | setRadiusNormals (float radius_normals) |
| Set the radius used to compute normals. | |
| void | setViewPoint (float vpx, float vpy, float vpz) |
| Set the viewpoint. | |
Protected Attributes | |
| std::vector< Eigen::Vector3f > | centroids_dominant_orientations_ |
| Centroids that were used to compute different CVFH descriptors. | |
| std::vector< Eigen::Vector3f > | dominant_normals_ |
| Normal centroids that were used to compute different CVFH descriptors. | |
Private Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the Clustered Viewpoint Feature Histograms (CVFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
| void | extractEuclideanClustersSmooth (const pcl::PointCloud< pcl::PointNormal > &cloud, const pcl::PointCloud< pcl::PointNormal > &normals, float tolerance, const pcl::search::Search< pcl::PointNormal >::Ptr &tree, std::vector< pcl::PointIndices > &clusters, double eps_angle, unsigned int min_pts_per_cluster=1, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
| Region growing method using Euclidean distances and neighbors normals to add points to a region. | |
Private Attributes | |
| float | cluster_tolerance_ |
| allowed Euclidean distance between points to be added to the cluster. | |
| float | curv_threshold_ |
| Curvature threshold for removing normals. | |
| float | eps_angle_threshold_ |
| deviation of the normals between two points so they can be clustered together. | |
| float | leaf_size_ |
| Size of the voxels after voxel gridding. IMPORTANT: Must match the voxel size of the training data or the normalize_bins_ flag must be set to true. | |
| size_t | min_points_ |
| Minimum amount of points in a clustered region to be considered stable for CVFH computation. | |
| bool | normalize_bins_ |
| Wether to normalize the signatures or not. Default: false. | |
| float | radius_normals_ |
| Radius for the normals computation. | |
| float | vpx_ |
| Values describing the viewpoint ("pinhole" camera model assumed). By default, the viewpoint is set to 0,0,0. | |
| float | vpy_ |
| float | vpz_ |
Detailed Description
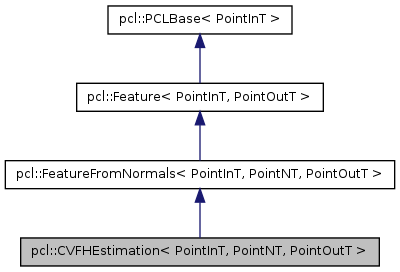
template<typename PointInT, typename PointNT, typename PointOutT = pcl::VFHSignature308>
class pcl::CVFHEstimation< PointInT, PointNT, PointOutT >
CVFHEstimation estimates the Clustered Viewpoint Feature Histogram (CVFH) descriptor for a given point cloud dataset containing XYZ data and normals, as presented in:
- CAD-Model Recognition and 6 DOF Pose Estimation A. Aldoma, N. Blodow, D. Gossow, S. Gedikli, R.B. Rusu, M. Vincze and G. Bradski ICCV 2011, 3D Representation and Recognition (3dRR11) workshop Barcelona, Spain, (2011)
The suggested PointOutT is pcl::VFHSignature308.
Member Typedef Documentation
| typedef pcl::search::Search<PointNormal>::Ptr pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::KdTreePtr |
Reimplemented from pcl::Feature< PointInT, PointOutT >.
| typedef pcl::NormalEstimation<PointNormal, PointNormal> pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::NormalEstimator |
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef pcl::VFHEstimation<PointInT, PointNT, pcl::VFHSignature308> pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::VFHEstimator |
Constructor & Destructor Documentation
| pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::CVFHEstimation | ( | ) | [inline] |
Member Function Documentation
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::compute | ( | PointCloudOut & | output | ) |
Overloaded computed method from pcl::Feature.
- Parameters:
-
[out] output the resultant point cloud model dataset containing the estimated features
Reimplemented from pcl::Feature< PointInT, PointOutT >.
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [private, virtual] |
Estimate the Clustered Viewpoint Feature Histograms (CVFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface ()
- Parameters:
-
[out] output the resultant point cloud model dataset that contains the CVFH feature estimates
Implements pcl::Feature< PointInT, PointOutT >.
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::extractEuclideanClustersSmooth | ( | const pcl::PointCloud< pcl::PointNormal > & | cloud, |
| const pcl::PointCloud< pcl::PointNormal > & | normals, | ||
| float | tolerance, | ||
| const pcl::search::Search< pcl::PointNormal >::Ptr & | tree, | ||
| std::vector< pcl::PointIndices > & | clusters, | ||
| double | eps_angle, | ||
| unsigned int | min_pts_per_cluster = 1, |
||
| unsigned int | max_pts_per_cluster = (std::numeric_limits<int>::max) () |
||
| ) | [private] |
Region growing method using Euclidean distances and neighbors normals to add points to a region.
- Parameters:
-
[in] cloud point cloud to split into regions [in] normals are the normals of cloud [in] tolerance is the allowed Euclidean distance between points to be added to the cluster [in] tree is the spatial search structure for nearest neighbour search [out] clusters vector of indices representing the clustered regions [in] eps_angle deviation of the normals between two points so they can be clustered together [in] min_pts_per_cluster minimum cluster size. (default: 1 point) [in] max_pts_per_cluster maximum cluster size. (default: all the points)
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::filterNormalsWithHighCurvature | ( | const pcl::PointCloud< PointNT > & | cloud, |
| std::vector< int > & | indices_to_use, | ||
| std::vector< int > & | indices_out, | ||
| std::vector< int > & | indices_in, | ||
| float | threshold | ||
| ) |
Removes normals with high curvature caused by real edges or noisy data.
- Parameters:
-
[in] cloud pointcloud to be filtered [out] indices_out the indices of the points with higher curvature than threshold [out] indices_in the indices of the remaining points after filtering [in] threshold threshold value for curvature
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::getCentroidClusters | ( | std::vector< Eigen::Vector3f > & | centroids | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::getCentroidNormalClusters | ( | std::vector< Eigen::Vector3f > & | centroids | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::getViewPoint | ( | float & | vpx, |
| float & | vpy, | ||
| float & | vpz | ||
| ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setClusterTolerance | ( | float | d | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setCurvatureThreshold | ( | float | d | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setEPSAngleThreshold | ( | float | d | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setMinPoints | ( | size_t | min | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setNormalizeBins | ( | bool | normalize | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setRadiusNormals | ( | float | radius_normals | ) | [inline] |
| void pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::setViewPoint | ( | float | vpx, |
| float | vpy, | ||
| float | vpz | ||
| ) | [inline] |
Member Data Documentation
std::vector<Eigen::Vector3f> pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::centroids_dominant_orientations_ [protected] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::cluster_tolerance_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::curv_threshold_ [private] |
std::vector<Eigen::Vector3f> pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::dominant_normals_ [protected] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::eps_angle_threshold_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::leaf_size_ [private] |
size_t pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::min_points_ [private] |
bool pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::normalize_bins_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::radius_normals_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::vpx_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::vpy_ [private] |
float pcl::CVFHEstimation< PointInT, PointNT, PointOutT >::vpz_ [private] |
The documentation for this class was generated from the following files: