#include <planning_scene_display.h>
Detailed Description
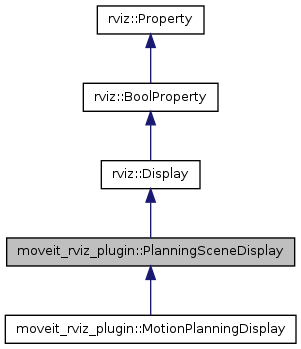
Definition at line 64 of file planning_scene_display.h.
Constructor & Destructor Documentation
| moveit_rviz_plugin::PlanningSceneDisplay::PlanningSceneDisplay | ( | bool | listen_to_planning_scene = true, |
| bool | show_scene_robot = true |
||
| ) |
Definition at line 59 of file planning_scene_display.cpp.
Definition at line 157 of file planning_scene_display.cpp.
Member Function Documentation
| void moveit_rviz_plugin::PlanningSceneDisplay::addBackgroundJob | ( | const boost::function< void()> & | job, |
| const std::string & | name | ||
| ) |
Definition at line 204 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::addMainLoopJob | ( | const boost::function< void()> & | job | ) |
Definition at line 209 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::calculateOffsetPosition | ( | ) | [protected] |
Set the scene node's position, given the target frame and the planning frame.
Definition at line 587 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedAttachedBodyColor | ( | ) | [private, slot] |
Definition at line 274 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedOctreeColorMode | ( | ) | [private, slot] |
Definition at line 353 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedOctreeRenderMode | ( | ) | [private, slot] |
Definition at line 349 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedPlanningSceneTopic | ( | ) | [private, slot] |
Definition at line 339 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedRobotDescription | ( | ) | [private, slot] |
Definition at line 284 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedRobotSceneAlpha | ( | ) | [private, slot] |
Definition at line 330 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneAlpha | ( | ) | [private, slot] |
Definition at line 325 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneColor | ( | ) | [private, slot] |
Definition at line 279 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneDisplayTime | ( | ) | [private, slot] |
Definition at line 345 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneEnabled | ( | ) | [private, slot] |
Definition at line 363 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneName | ( | ) | [private, slot] |
Definition at line 290 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::changedSceneRobotEnabled | ( | ) | [private, slot] |
Definition at line 357 of file planning_scene_display.cpp.
Definition at line 168 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::clearRobotModel | ( | ) | [protected] |
This function is used by loadRobotModel() and should only be called in the MainLoop You probably should not call this function directly
Definition at line 448 of file planning_scene_display.cpp.
| planning_scene_monitor::PlanningSceneMonitorPtr moveit_rviz_plugin::PlanningSceneDisplay::createPlanningSceneMonitor | ( | ) | [protected, virtual] |
This function constructs a new planning scene. Probably this should be called in a background thread as it may take some time to complete its execution
Definition at line 440 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::executeMainLoopJobs | ( | ) | [protected] |
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 222 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::fixedFrameChanged | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 620 of file planning_scene_display.cpp.
| const planning_scene_monitor::PlanningSceneMonitorPtr & moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneMonitor | ( | ) |
Definition at line 248 of file planning_scene_display.cpp.
| planning_scene_monitor::LockedPlanningSceneRO moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneRO | ( | ) | const |
Definition at line 264 of file planning_scene_display.cpp.
| planning_scene_monitor::LockedPlanningSceneRW moveit_rviz_plugin::PlanningSceneDisplay::getPlanningSceneRW | ( | ) |
Definition at line 269 of file planning_scene_display.cpp.
| const robot_model::RobotModelConstPtr & moveit_rviz_plugin::PlanningSceneDisplay::getRobotModel | ( | ) | const |
Definition at line 253 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::load | ( | const rviz::Config & | config | ) | [virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 574 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::loadRobotModel | ( | ) | [protected] |
This function reloads the robot model and reinitializes the PlanningSceneMonitor It can be called either from the Main Loop or from a Background thread
Definition at line 454 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::onDisable | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 536 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::onEnable | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 519 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::onInitialize | ( | ) | [protected, virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 177 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::onRobotModelLoaded | ( | ) | [protected, virtual] |
This is an event called by loadRobotModel() in the MainLoop; do not call directly.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 486 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::onSceneMonitorReceivedUpdate | ( | planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType | update_type | ) | [protected, virtual] |
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 510 of file planning_scene_display.cpp.
Definition at line 549 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::renderPlanningScene | ( | ) | [protected] |
Definition at line 297 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::reset | ( | void | ) | [virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 191 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::save | ( | rviz::Config | config | ) | const [virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 579 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::sceneMonitorReceivedUpdate | ( | planning_scene_monitor::PlanningSceneMonitor::SceneUpdateType | update_type | ) | [protected] |
Definition at line 505 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::setGroupColor | ( | rviz::Robot * | robot, |
| const std::string & | group_name, | ||
| const QColor & | color | ||
| ) | [protected] |
Definition at line 369 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::setLinkColor | ( | const std::string & | link_name, |
| const QColor & | color | ||
| ) |
Definition at line 407 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::setLinkColor | ( | rviz::Robot * | robot, |
| const std::string & | link_name, | ||
| const QColor & | color | ||
| ) | [protected] |
Definition at line 419 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetAllColors | ( | rviz::Robot * | robot | ) | [protected] |
Definition at line 383 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetGroupColor | ( | rviz::Robot * | robot, |
| const std::string & | group_name | ||
| ) | [protected] |
Definition at line 393 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetLinkColor | ( | const std::string & | link_name | ) |
Definition at line 413 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::unsetLinkColor | ( | rviz::Robot * | robot, |
| const std::string & | link_name | ||
| ) | [protected] |
Definition at line 428 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::update | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [virtual] |
Reimplemented from rviz::Display.
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 554 of file planning_scene_display.cpp.
| void moveit_rviz_plugin::PlanningSceneDisplay::updateInternal | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [protected, virtual] |
Reimplemented in moveit_rviz_plugin::MotionPlanningDisplay.
Definition at line 564 of file planning_scene_display.cpp.
Definition at line 215 of file planning_scene_display.cpp.
Member Data Documentation
rviz::ColorProperty* moveit_rviz_plugin::PlanningSceneDisplay::attached_body_color_property_ [protected] |
Definition at line 189 of file planning_scene_display.h.
Definition at line 164 of file planning_scene_display.h.
float moveit_rviz_plugin::PlanningSceneDisplay::current_scene_time_ [protected] |
Definition at line 176 of file planning_scene_display.h.
std::deque<boost::function<void()> > moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_ [protected] |
Definition at line 165 of file planning_scene_display.h.
boost::condition_variable moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_empty_condition_ [protected] |
Definition at line 167 of file planning_scene_display.h.
boost::mutex moveit_rviz_plugin::PlanningSceneDisplay::main_loop_jobs_lock_ [protected] |
Definition at line 166 of file planning_scene_display.h.
bool moveit_rviz_plugin::PlanningSceneDisplay::model_is_loading_ [protected] |
Definition at line 161 of file planning_scene_display.h.
Definition at line 192 of file planning_scene_display.h.
Definition at line 191 of file planning_scene_display.h.
planning_scene_monitor::PlanningSceneMonitorPtr moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_monitor_ [protected] |
Definition at line 160 of file planning_scene_display.h.
Definition at line 175 of file planning_scene_display.h.
Ogre::SceneNode* moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_node_ [protected] |
displays planning scene with everything in it
Definition at line 169 of file planning_scene_display.h.
Definition at line 173 of file planning_scene_display.h.
RobotStateVisualizationPtr moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_robot_ [protected] |
Definition at line 172 of file planning_scene_display.h.
rviz::RosTopicProperty* moveit_rviz_plugin::PlanningSceneDisplay::planning_scene_topic_property_ [protected] |
Definition at line 185 of file planning_scene_display.h.
Definition at line 186 of file planning_scene_display.h.
Definition at line 179 of file planning_scene_display.h.
rviz::StringProperty* moveit_rviz_plugin::PlanningSceneDisplay::robot_description_property_ [protected] |
Definition at line 181 of file planning_scene_display.h.
boost::mutex moveit_rviz_plugin::PlanningSceneDisplay::robot_model_loading_lock_ [protected] |
Definition at line 162 of file planning_scene_display.h.
Definition at line 187 of file planning_scene_display.h.
Definition at line 178 of file planning_scene_display.h.
Definition at line 188 of file planning_scene_display.h.
rviz::FloatProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_display_time_property_ [protected] |
Definition at line 190 of file planning_scene_display.h.
Definition at line 183 of file planning_scene_display.h.
Definition at line 182 of file planning_scene_display.h.
rviz::BoolProperty* moveit_rviz_plugin::PlanningSceneDisplay::scene_robot_enabled_property_ [protected] |
Definition at line 184 of file planning_scene_display.h.
The documentation for this class was generated from the following files: