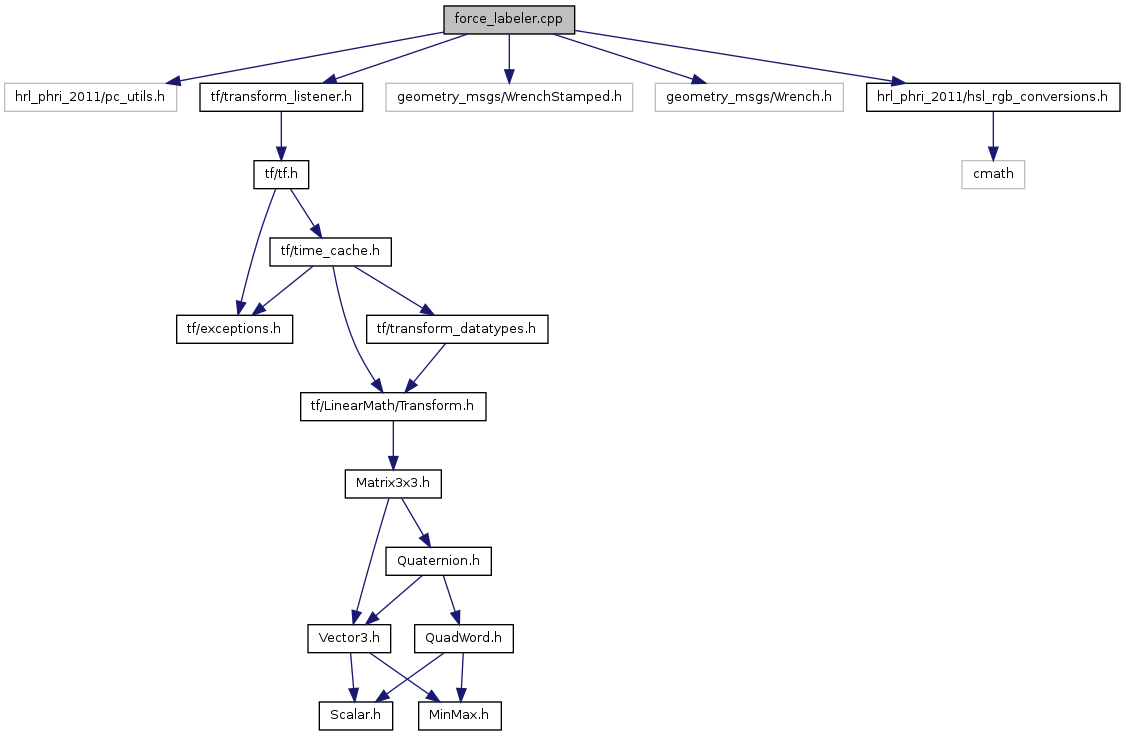
#include <hrl_phri_2011/pc_utils.h>#include <tf/transform_listener.h>#include <geometry_msgs/WrenchStamped.h>#include <geometry_msgs/Wrench.h>#include <hrl_phri_2011/hsl_rgb_conversions.h>
Include dependency graph for force_labeler.cpp:
Go to the source code of this file.
Classes | |
| class | ForceVisualizer |
Defines | |
| #define | NORM(x, y, z) ( std::sqrt( (x) * (x) + (y) * (y) + (z) * (z) ) ) |
| #define | NORMAL(x, sig) ( std::exp( - (x) * (x) / (2.0 * (sig) * (sig))) / std::sqrt(2.0 * 3.14159 * (sig) * (sig))) |
Typedefs | |
| typedef Eigen::Matrix< double, 6, 1 > | CartVec |
Functions | |
| int | main (int argc, char **argv) |
| void | wrenchMsgToEigen (const geometry_msgs::Wrench &wrench_msg, CartVec &wrench_eig) |
Define Documentation
Definition at line 19 of file force_labeler.cpp.
| #define NORMAL | ( | x, | |
| sig | |||
| ) | ( std::exp( - (x) * (x) / (2.0 * (sig) * (sig))) / std::sqrt(2.0 * 3.14159 * (sig) * (sig))) |
Definition at line 21 of file force_labeler.cpp.
Typedef Documentation
| typedef Eigen::Matrix<double, 6, 1> CartVec |
Definition at line 7 of file force_labeler.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 128 of file force_labeler.cpp.
| void wrenchMsgToEigen | ( | const geometry_msgs::Wrench & | wrench_msg, |
| CartVec & | wrench_eig | ||
| ) |
Definition at line 9 of file force_labeler.cpp.