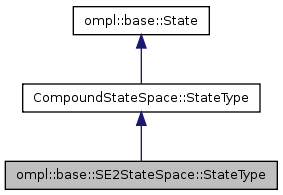
A state in SE(2): (x, y, yaw). More...
#include <SE2StateSpace.h>
Public Member Functions | |
| double | getX (void) const |
| Get the X component of the state. | |
| double | getY (void) const |
| Get the Y component of the state. | |
| double | getYaw (void) const |
| Get the yaw component of the state. This is the rotation in plane, with respect to the Z axis. | |
| void | setX (double x) |
| Set the X component of the state. | |
| void | setXY (double x, double y) |
| Set the X and Y components of the state. | |
| void | setY (double y) |
| Set the Y component of the state. | |
| void | setYaw (double yaw) |
| Set the yaw component of the state. This is the rotation in plane, with respect to the Z axis. | |
| StateType (void) | |
A state in SE(2): (x, y, yaw).
Definition at line 47 of file SE2StateSpace.h.
| ompl::base::SE2StateSpace::StateType::StateType | ( | void | ) | [inline] |
Definition at line 45 of file SE2StateSpace.h.
| double ompl::base::SE2StateSpace::StateType::getX | ( | void | ) | const [inline] |
Get the X component of the state.
Definition at line 50 of file SE2StateSpace.h.
| double ompl::base::SE2StateSpace::StateType::getY | ( | void | ) | const [inline] |
Get the Y component of the state.
Definition at line 56 of file SE2StateSpace.h.
| double ompl::base::SE2StateSpace::StateType::getYaw | ( | void | ) | const [inline] |
Get the yaw component of the state. This is the rotation in plane, with respect to the Z axis.
Definition at line 64 of file SE2StateSpace.h.
| void ompl::base::SE2StateSpace::StateType::setX | ( | double | x | ) | [inline] |
Set the X component of the state.
Definition at line 70 of file SE2StateSpace.h.
| void ompl::base::SE2StateSpace::StateType::setXY | ( | double | x, | |
| double | y | |||
| ) | [inline] |
Set the X and Y components of the state.
Definition at line 82 of file SE2StateSpace.h.
| void ompl::base::SE2StateSpace::StateType::setY | ( | double | y | ) | [inline] |
Set the Y component of the state.
Definition at line 76 of file SE2StateSpace.h.
| void ompl::base::SE2StateSpace::StateType::setYaw | ( | double | yaw | ) | [inline] |
Set the yaw component of the state. This is the rotation in plane, with respect to the Z axis.
Definition at line 91 of file SE2StateSpace.h.

