Implements the abstract Grasp Wrench Space class and specific GWS classes. More...
#include <math.h>#include <string.h>#include "gws.h"#include "grasp.h"#include "mytools.h"#include "body.h"#include "debug.h"#include "qhull_a.h"#include "qhull_mutex.h"#include <qmutex.h>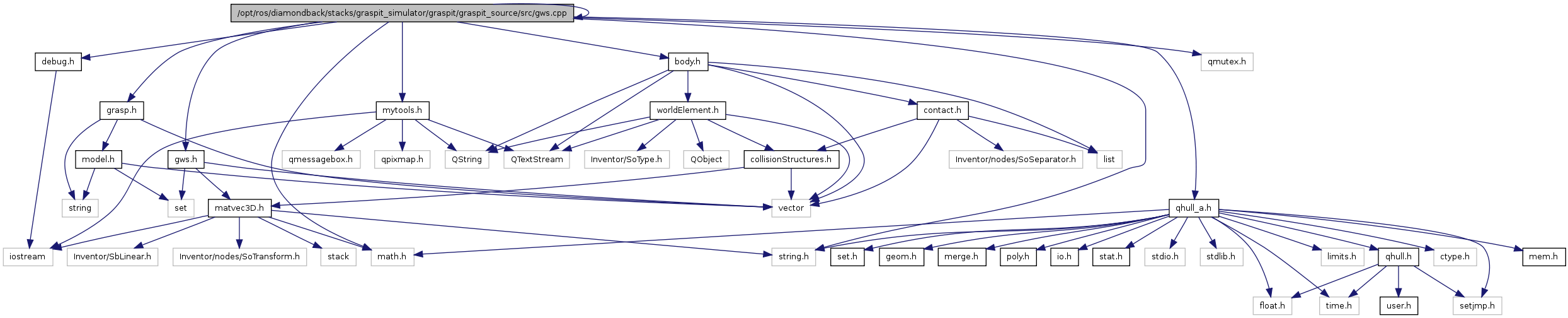

Go to the source code of this file.
Defines | |
| #define | IVTOL 1e-5 |
Typedefs | |
| typedef double * | doublePtr |
Functions | |
| void | minkowskiSum (Grasp *g, int c, int &wrenchNum, coordT *wrenchArray, Wrench prevSum, std::vector< int > useDimensions) |
Variables | |
| char | qh_version [] = "GraspIt 2.0b" |
| QMutex | qhull_mutex |
| A global mutex used for synchronizing access to QHull, which is not thread-safe. | |
Implements the abstract Grasp Wrench Space class and specific GWS classes.
Definition in file gws.cpp.
| char qh_version[] = "GraspIt 2.0b" |
| QMutex qhull_mutex |

