Class for City10000 dataset. More...
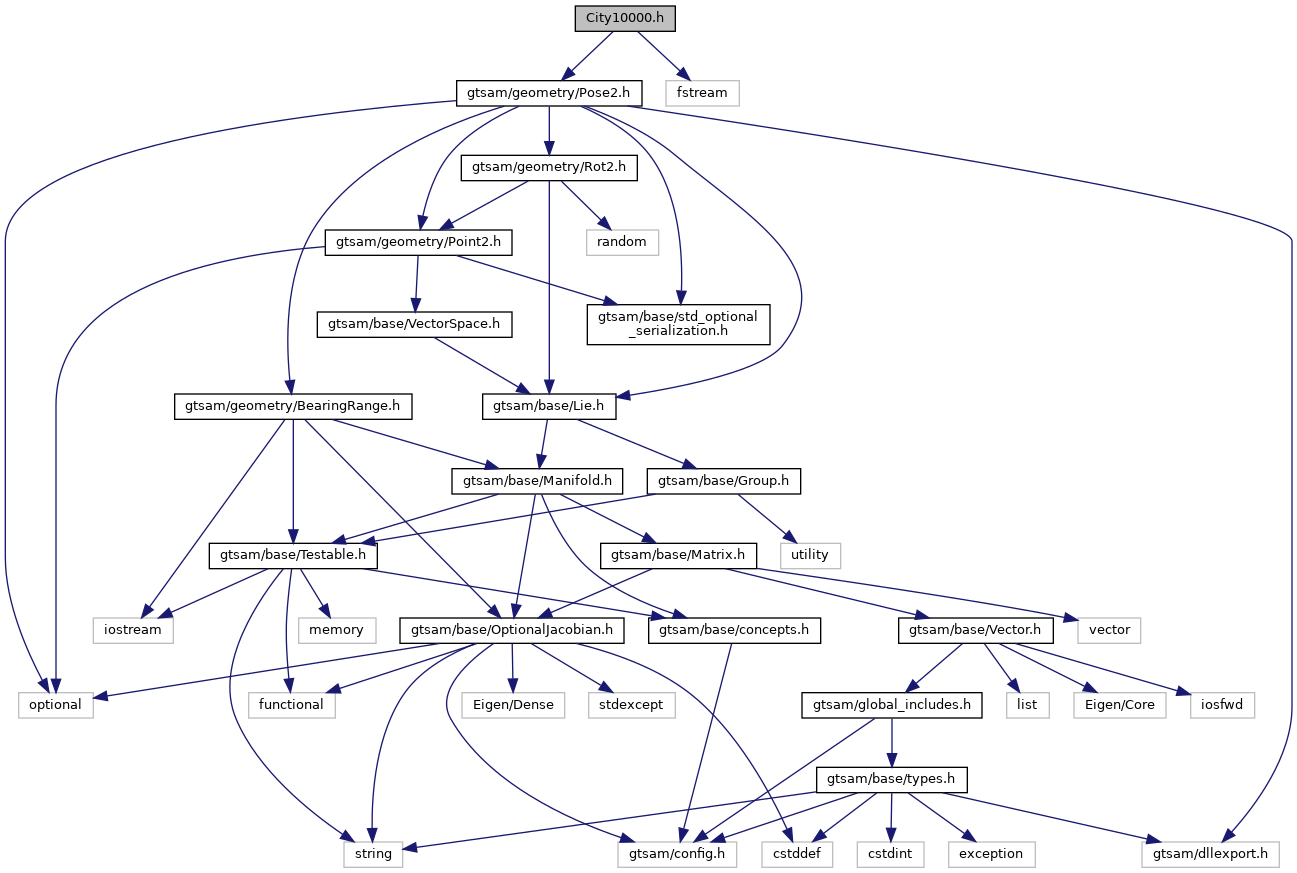
Include dependency graph for City10000.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | City10000Dataset |
Functions | |
| void | writeResult (const Values &result, size_t numPoses, const std::string &filename="Hybrid_city10000.txt") |
| Write the result of optimization to file. More... | |
Variables | |
| const double | kOpenLoopConstant = kOpenLoopModel->negLogConstant() |
| auto | kOpenLoopModel = noiseModel::Diagonal::Sigmas(Vector3::Ones() * 10) |
| const double | kPoseNoiseConstant = kPoseNoiseModel->negLogConstant() |
| auto | kPoseNoiseModel |
| auto | kPriorNoiseModel |
Detailed Description
Function Documentation
◆ writeResult()
| void writeResult | ( | const Values & | result, |
| size_t | numPoses, | ||
| const std::string & | filename = "Hybrid_city10000.txt" |
||
| ) |
Write the result of optimization to file.
- Parameters
-
result The Values object with the final result. num_poses The number of poses to write to the file. filename The file name to save the result to.
Definition at line 98 of file City10000.h.
Variable Documentation
◆ kOpenLoopConstant
| const double kOpenLoopConstant = kOpenLoopModel->negLogConstant() |
Definition at line 28 of file City10000.h.
◆ kOpenLoopModel
| auto kOpenLoopModel = noiseModel::Diagonal::Sigmas(Vector3::Ones() * 10) |
Definition at line 27 of file City10000.h.
◆ kPoseNoiseConstant
| const double kPoseNoiseConstant = kPoseNoiseModel->negLogConstant() |
Definition at line 35 of file City10000.h.
◆ kPoseNoiseModel
| auto kPoseNoiseModel |
Initial value:
= noiseModel::Diagonal::Sigmas(
(Vector(3) << 1.0 / 30.0, 1.0 / 30.0, 1.0 / 100.0).finished())
Definition at line 33 of file City10000.h.
◆ kPriorNoiseModel
| auto kPriorNoiseModel |
Initial value:
= noiseModel::Diagonal::Sigmas(
(Vector(3) << 0.0001, 0.0001, 0.0001).finished())
Definition at line 30 of file City10000.h.