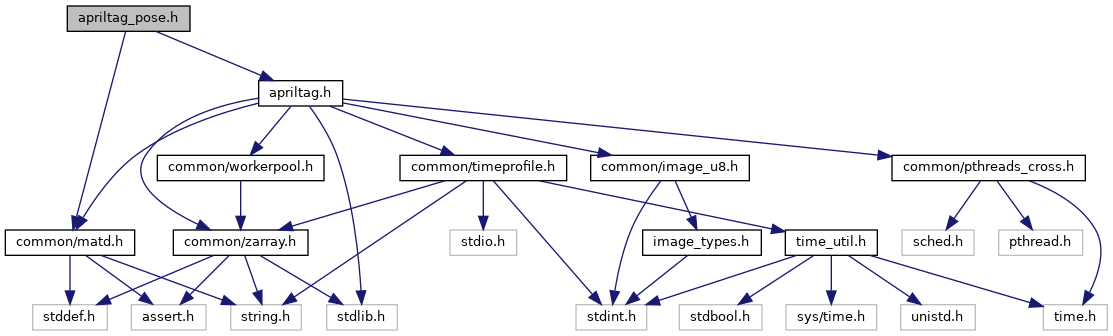
Go to the source code of this file.
Classes | |
| struct | apriltag_detection_info_t |
| struct | apriltag_pose_t |
Functions | |
| void | estimate_pose_for_tag_homography (apriltag_detection_info_t *info, apriltag_pose_t *pose) |
| double | estimate_tag_pose (apriltag_detection_info_t *info, apriltag_pose_t *pose) |
| void | estimate_tag_pose_orthogonal_iteration (apriltag_detection_info_t *info, double *err1, apriltag_pose_t *pose1, double *err2, apriltag_pose_t *pose2, int nIters) |
Function Documentation
◆ estimate_pose_for_tag_homography()
| void estimate_pose_for_tag_homography | ( | apriltag_detection_info_t * | info, |
| apriltag_pose_t * | solution | ||
| ) |
Estimate pose of the tag using the homography method described in [1]. @outparam pose
Estimate pose of the tag using the homography method.
Definition at line 455 of file apriltag_pose.c.
◆ estimate_tag_pose()
| double estimate_tag_pose | ( | apriltag_detection_info_t * | info, |
| apriltag_pose_t * | pose | ||
| ) |
Estimate tag pose. This method is an easier to use interface to estimate_tag_pose_orthogonal_iteration.
@outparam pose
- Returns
- Object-space error of returned pose.
Estimate tag pose.
Definition at line 528 of file apriltag_pose.c.
◆ estimate_tag_pose_orthogonal_iteration()
| void estimate_tag_pose_orthogonal_iteration | ( | apriltag_detection_info_t * | info, |
| double * | err1, | ||
| apriltag_pose_t * | solution1, | ||
| double * | err2, | ||
| apriltag_pose_t * | solution2, | ||
| int | nIters | ||
| ) |
Estimate pose of the tag. This returns one or two possible poses for the tag, along with the object-space error of each.
This uses the homography method described in [1] for the initial estimate. Then Orthogonal Iteration [2] is used to refine this estimate. Then [3] is used to find a potential second local minima and Orthogonal Iteration is used to refine this second estimate.
[1]: E. Olson, "Apriltag: A robust and flexible visual fiducial system," in 2011 IEEE International Conference on Robotics and Automation, May 2011, pp. 3400-3407. [2]: Lu, G. D. Hager and E. Mjolsness, "Fast and globally convergent pose estimation from video images," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 6, pp. 610-622, June 2000. doi: 10.1109/34.862199 [3]: Schweighofer and A. Pinz, "Robust Pose Estimation from a Planar Target," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 28, no. 12, pp. 2024-2030, Dec. 2006. doi: 10.1109/TPAMI.2006.252
@outparam err1, pose1, err2, pose2
Estimate tag pose using orthogonal iteration.
Definition at line 490 of file apriltag_pose.c.