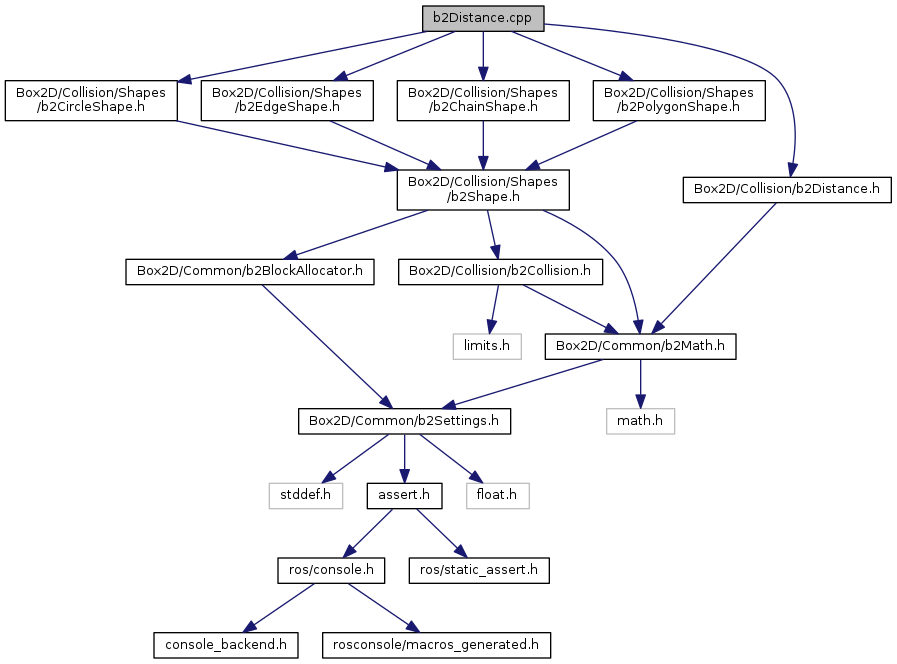
#include <Box2D/Collision/b2Distance.h>#include <Box2D/Collision/Shapes/b2CircleShape.h>#include <Box2D/Collision/Shapes/b2EdgeShape.h>#include <Box2D/Collision/Shapes/b2ChainShape.h>#include <Box2D/Collision/Shapes/b2PolygonShape.h>
Include dependency graph for b2Distance.cpp:
Go to the source code of this file.
Classes | |
| struct | b2Simplex |
| struct | b2SimplexVertex |
Functions | |
| void | b2Distance (b2DistanceOutput *output, b2SimplexCache *cache, const b2DistanceInput *input) |
Variables | |
| int32 | b2_gjkCalls |
| int32 | b2_gjkIters |
| int32 | b2_gjkMaxIters |
Function Documentation
| void b2Distance | ( | b2DistanceOutput * | output, |
| b2SimplexCache * | cache, | ||
| const b2DistanceInput * | input | ||
| ) |
Compute the closest points between two shapes. Supports any combination of: b2CircleShape, b2PolygonShape, b2EdgeShape. The simplex cache is input/output. On the first call set b2SimplexCache.count to zero.
Definition at line 444 of file b2Distance.cpp.
Variable Documentation
| int32 b2_gjkCalls |
Definition at line 26 of file b2Distance.cpp.
| int32 b2_gjkIters |
Definition at line 26 of file b2Distance.cpp.
| int32 b2_gjkMaxIters |
Definition at line 26 of file b2Distance.cpp.