#include <sr_hardware_interface/sr_actuator.hpp>#include <sr_utilities/sr_math_utils.hpp>#include <sr_utilities/calibration.hpp>#include <sr_utilities/thread_safe_map.hpp>#include <string>#include <vector>
Include dependency graph for sr_joint_motor.hpp:

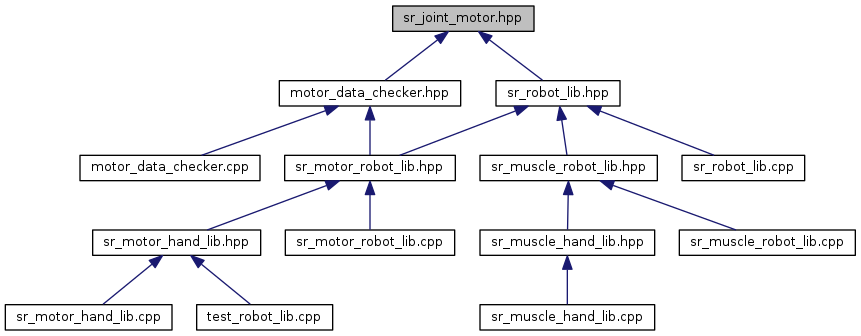
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | shadow_joints::Joint |
| struct | shadow_joints::JointToMuscle |
| struct | shadow_joints::JointToSensor |
| class | shadow_joints::MotorWrapper |
| class | shadow_joints::MuscleDriver |
| class | shadow_joints::MuscleWrapper |
| struct | shadow_joints::PartialJointToSensor |
| class | shadow_joints::SrActuatorWrapper |
Namespaces | |
| shadow_joints | |
Typedefs | |
| typedef threadsafe::Map< boost::shared_ptr< shadow_robot::JointCalibration > > | shadow_joints::CalibrationMap |