Public Member Functions | |
| BaseOOPETest () | |
Static Public Attributes | |
| static constexpr double | Default_Prob = 0.0 |
| static constexpr double | Map_Scale = 1 |
Protected Types | |
| using | AOO = AreaOccupancyObservation |
| using | LWR = LightWeightRectangle |
| using | Shift = Point2D |
Protected Member Functions | |
| auto | cell_range () const |
| template<int i, int j> | |
| auto | mid () const |
| auto | mid_cell () const |
| template<typename OOPE > | |
| void | test_oope (double expected, const Point2D &obstacle, const LWR &range={0, 0, 0, 0}) const |
| void | update_map (const UnboundedPlainGridMap::Coord &area_id, double occ) |
Protected Attributes | |
| UnboundedPlainGridMap | map |
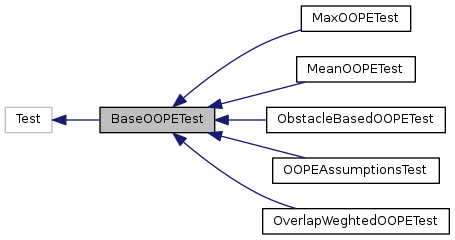
Detailed Description
Definition at line 12 of file occupancy_observation_probability_test.cpp.
Member Typedef Documentation
|
protected |
Definition at line 24 of file occupancy_observation_probability_test.cpp.
|
protected |
Definition at line 25 of file occupancy_observation_probability_test.cpp.
|
protected |
Definition at line 26 of file occupancy_observation_probability_test.cpp.
Constructor & Destructor Documentation
|
inline |
Definition at line 17 of file occupancy_observation_probability_test.cpp.
Member Function Documentation
|
inlineprotected |
Definition at line 40 of file occupancy_observation_probability_test.cpp.
|
inlineprotected |
Definition at line 44 of file occupancy_observation_probability_test.cpp.
|
inlineprotected |
Definition at line 41 of file occupancy_observation_probability_test.cpp.
|
inlineprotected |
Definition at line 33 of file occupancy_observation_probability_test.cpp.
|
inlineprotected |
Definition at line 28 of file occupancy_observation_probability_test.cpp.
Member Data Documentation
|
static |
Definition at line 15 of file occupancy_observation_probability_test.cpp.
|
protected |
Definition at line 46 of file occupancy_observation_probability_test.cpp.
|
static |
Definition at line 14 of file occupancy_observation_probability_test.cpp.
The documentation for this class was generated from the following file: