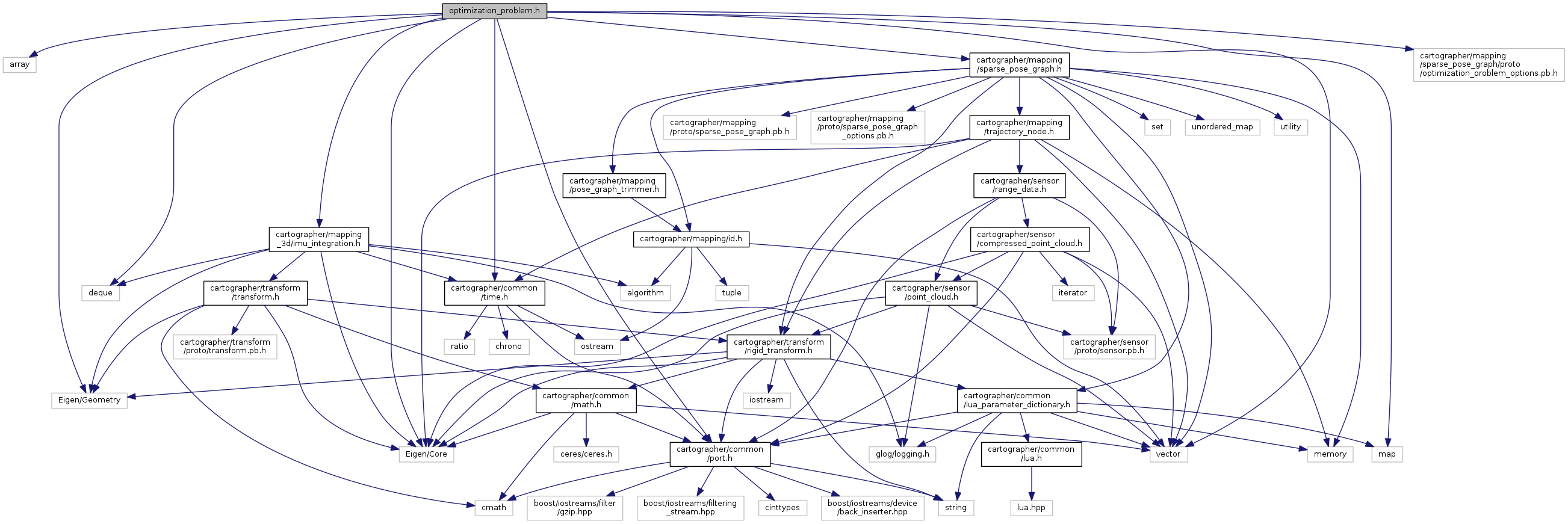
#include <array>#include <deque>#include <map>#include <vector>#include "Eigen/Core"#include "Eigen/Geometry"#include "cartographer/common/port.h"#include "cartographer/common/time.h"#include "cartographer/mapping/sparse_pose_graph.h"#include "cartographer/mapping/sparse_pose_graph/proto/optimization_problem_options.pb.h"#include "cartographer/mapping_3d/imu_integration.h"
Include dependency graph for mapping_3d/sparse_pose_graph/optimization_problem.h:
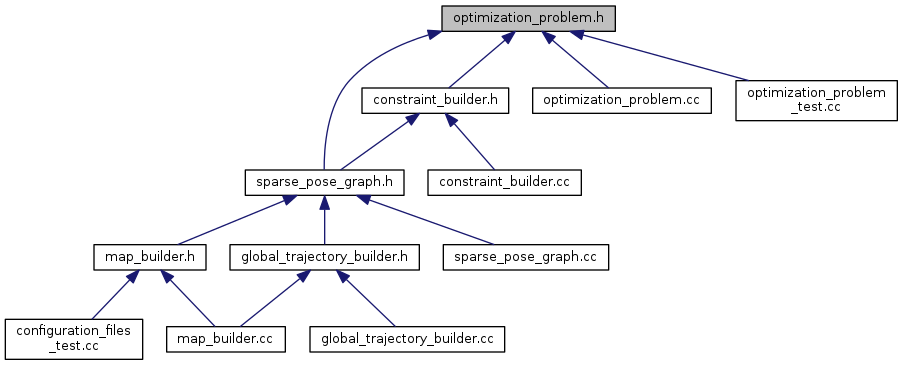
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping_3d | |
| cartographer::mapping_3d::sparse_pose_graph | |