#include <array>#include <deque>#include <functional>#include <limits>#include <vector>#include "Eigen/Core"#include "Eigen/Geometry"#include "cartographer/common/fixed_ratio_sampler.h"#include "cartographer/common/histogram.h"#include "cartographer/common/math.h"#include "cartographer/common/mutex.h"#include "cartographer/common/thread_pool.h"#include "cartographer/mapping/sparse_pose_graph.h"#include "cartographer/mapping/sparse_pose_graph/proto/constraint_builder_options.pb.h"#include "cartographer/mapping/trajectory_connectivity.h"#include "cartographer/mapping_2d/scan_matching/ceres_scan_matcher.h"#include "cartographer/mapping_2d/scan_matching/fast_correlative_scan_matcher.h"#include "cartographer/mapping_3d/scan_matching/ceres_scan_matcher.h"#include "cartographer/mapping_3d/scan_matching/fast_correlative_scan_matcher.h"#include "cartographer/sensor/point_cloud.h"#include "cartographer/sensor/voxel_filter.h"
Include dependency graph for 2d/sparse_pose_graph/constraint_builder.h:

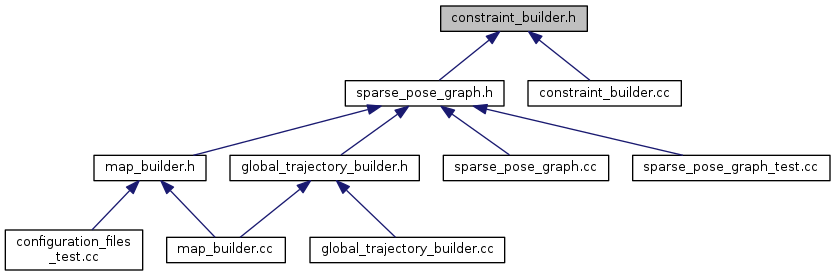
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cartographer::mapping_2d::sparse_pose_graph::ConstraintBuilder |
| struct | cartographer::mapping_2d::sparse_pose_graph::ConstraintBuilder::SubmapScanMatcher |
Namespaces | |
| cartographer | |
| cartographer::mapping_2d | |
| cartographer::mapping_2d::sparse_pose_graph | |
Functions | |
| transform::Rigid2d | cartographer::mapping_2d::sparse_pose_graph::ComputeSubmapPose (const mapping::Submap &submap) |