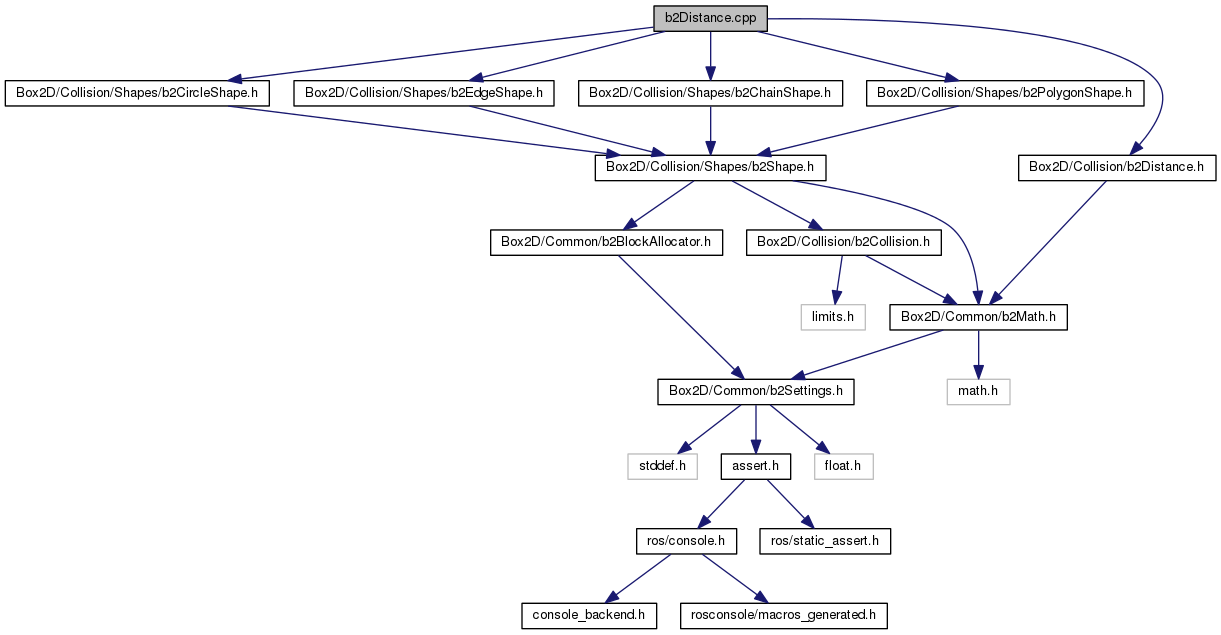
#include <Box2D/Collision/b2Distance.h>#include <Box2D/Collision/Shapes/b2CircleShape.h>#include <Box2D/Collision/Shapes/b2EdgeShape.h>#include <Box2D/Collision/Shapes/b2ChainShape.h>#include <Box2D/Collision/Shapes/b2PolygonShape.h>
Include dependency graph for b2Distance.cpp:
Go to the source code of this file.
Classes | |
| struct | b2Simplex |
| struct | b2SimplexVertex |
Functions | |
| void | b2Distance (b2DistanceOutput *output, b2SimplexCache *cache, const b2DistanceInput *input) |
Variables | |
| int32 | b2_gjkCalls |
| int32 | b2_gjkIters |
| int32 | b2_gjkMaxIters |
Function Documentation
| void b2Distance | ( | b2DistanceOutput * | output, |
| b2SimplexCache * | cache, | ||
| const b2DistanceInput * | input | ||
| ) |
Compute the closest points between two shapes. Supports any combination of: b2CircleShape, b2PolygonShape, b2EdgeShape. The simplex cache is input/output. On the first call set b2SimplexCache.count to zero.
Definition at line 444 of file b2Distance.cpp.
Variable Documentation
Definition at line 26 of file b2Distance.cpp.
Definition at line 26 of file b2Distance.cpp.
Definition at line 26 of file b2Distance.cpp.