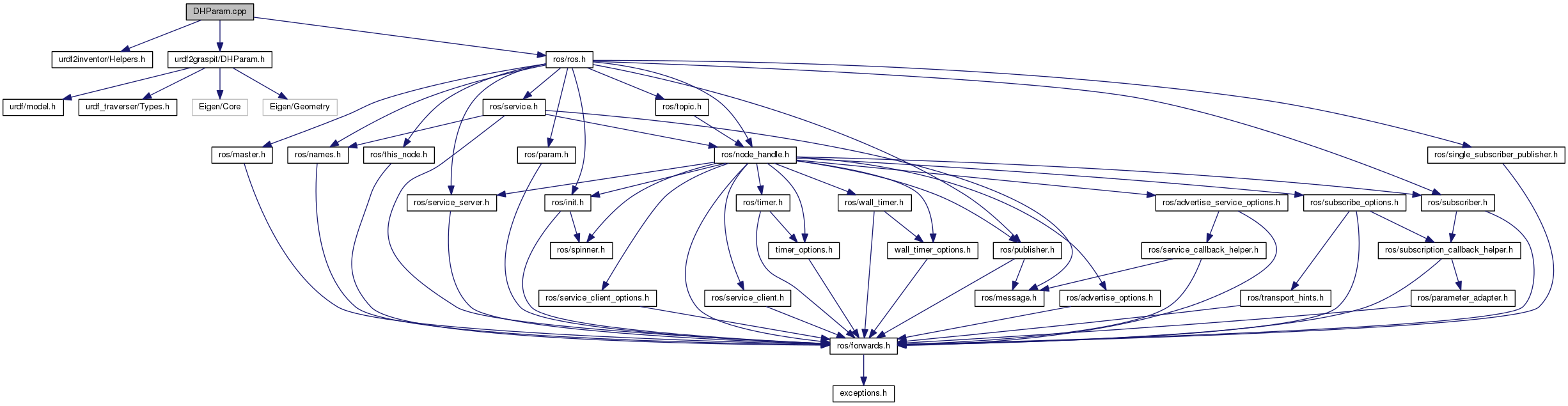
Go to the source code of this file.
Defines | |
| #define | DH_ZERO_DOT_EPSILON 1e-03 |
| #define | DH_ZERO_EPSILON 1e-05 |
Functions | |
| bool | equalAxis (const Eigen::Vector3d &z1, const Eigen::Vector3d &z2) |
| int | equalOrParallelAxis (const Eigen::Vector3d &z1, const Eigen::Vector3d &z2) |
| bool | intersectLinePlane (const Eigen::Vector3d &linePoint, const Eigen::Vector3d &lineDir, const Eigen::Vector3d &planePoint, const Eigen::Vector3d &n, Eigen::Vector3d &intersect) |
| double | linesDistance (const Eigen::Vector3d &zi_1, const Eigen::Vector3d &zi, const Eigen::Vector3d &pi_1, const Eigen::Vector3d &pi, bool ¶llel, Eigen::Vector3d &cli_1, Eigen::Vector3d &cli) |
| bool | parallelAxis (const Eigen::Vector3d &z1, const Eigen::Vector3d &z2) |
| double | squaredLinesDistance (const Eigen::Vector3d &zi_1, const Eigen::Vector3d &zi, const Eigen::Vector3d &pi_1, const Eigen::Vector3d &pi, bool ¶llel, Eigen::Vector3d &cli_1, Eigen::Vector3d &cli) |
| template<typename Derived > | |
| Eigen::VectorBlock< Derived, 2 > | subVec2 (Eigen::MatrixBase< Derived > &v) |
Define Documentation
| #define DH_ZERO_DOT_EPSILON 1e-03 |
Definition at line 28 of file DHParam.cpp.
| #define DH_ZERO_EPSILON 1e-05 |
Copyright (C) 2015 Jennifer Buehler
This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program; if not, write to the Free Software Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
Definition at line 24 of file DHParam.cpp.
Function Documentation
| bool equalAxis | ( | const Eigen::Vector3d & | z1, |
| const Eigen::Vector3d & | z2 | ||
| ) |
Definition at line 43 of file DHParam.cpp.
| int equalOrParallelAxis | ( | const Eigen::Vector3d & | z1, |
| const Eigen::Vector3d & | z2 | ||
| ) |
- Return values:
-
0 neither equal nor parallel 1 parallel 2 equal
Definition at line 62 of file DHParam.cpp.
| bool intersectLinePlane | ( | const Eigen::Vector3d & | linePoint, |
| const Eigen::Vector3d & | lineDir, | ||
| const Eigen::Vector3d & | planePoint, | ||
| const Eigen::Vector3d & | n, | ||
| Eigen::Vector3d & | intersect | ||
| ) |
Definition at line 75 of file DHParam.cpp.
| double linesDistance | ( | const Eigen::Vector3d & | zi_1, |
| const Eigen::Vector3d & | zi, | ||
| const Eigen::Vector3d & | pi_1, | ||
| const Eigen::Vector3d & | pi, | ||
| bool & | parallel, | ||
| Eigen::Vector3d & | cli_1, | ||
| Eigen::Vector3d & | cli | ||
| ) |
Definition at line 167 of file DHParam.cpp.
| bool parallelAxis | ( | const Eigen::Vector3d & | z1, |
| const Eigen::Vector3d & | z2 | ||
| ) |
Definition at line 50 of file DHParam.cpp.
| double squaredLinesDistance | ( | const Eigen::Vector3d & | zi_1, |
| const Eigen::Vector3d & | zi, | ||
| const Eigen::Vector3d & | pi_1, | ||
| const Eigen::Vector3d & | pi, | ||
| bool & | parallel, | ||
| Eigen::Vector3d & | cli_1, | ||
| Eigen::Vector3d & | cli | ||
| ) |
returns distance between two lines (squared) L1=pi_1 + m1* zi_1 and L2=pi + m2 * zi. In case the lines are skew (or intersect), parameter parallel is false, and the function also returns closest points cli_1 and cli (in intersection case, those will be the same points). In case they are parallel, any two closest points along the lines are returned.
Definition at line 114 of file DHParam.cpp.
| Eigen::VectorBlock<Derived, 2> subVec2 | ( | Eigen::MatrixBase< Derived > & | v | ) |
Definition at line 38 of file DHParam.cpp.