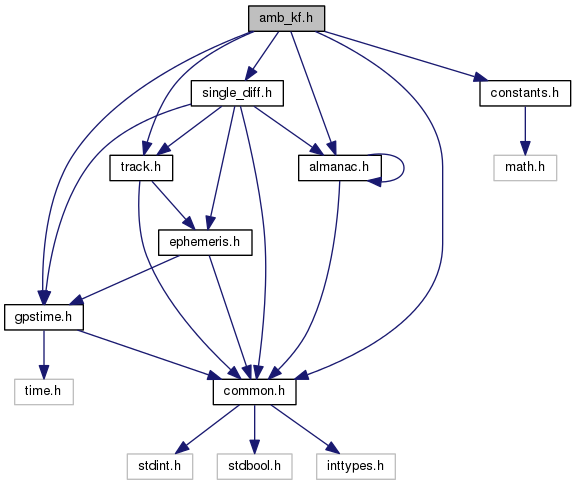
#include "track.h"#include "almanac.h"#include "gpstime.h"#include "common.h"#include "single_diff.h"#include "constants.h"
Include dependency graph for amb_kf.h:
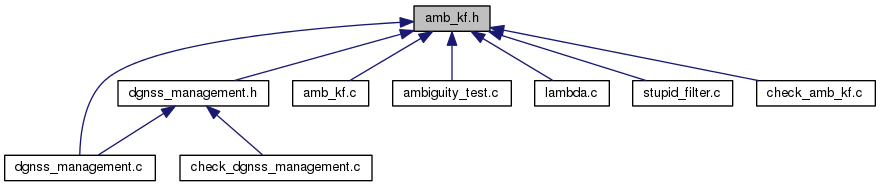
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | nkf_t |
Defines | |
| #define | MAX_OBS_DIM (2 * MAX_CHANNELS - 5) |
| #define | MAX_STATE_DIM (MAX_CHANNELS - 1) |
Functions | |
| void | assign_de_mtx (u8 num_sats, sdiff_t *sats_with_ref_first, double ref_ecef[3], double *DE) |
| void | assign_phase_obs_null_basis (u8 num_dds, double *DE_mtx, double *q) |
| s32 | find_index_of_element_in_u8s (u32 num_elements, u8 x, u8 *list) |
| void | least_squares_solve_b (nkf_t *kf, sdiff_t *sdiffs_with_ref_first, double *dd_measurements, double ref_ecef[3], double b[3]) |
| void | least_squares_solve_b_external_ambs (u8 num_dds, double *ambs, sdiff_t *sdiffs_with_ref_first, double *dd_measurements, double ref_ecef[3], double b[3]) |
| void | nkf_state_inclusion (nkf_t *kf, u8 num_old_non_ref_sats, u8 num_new_non_ref_sats, u8 *ndx_of_old_sat_in_new, double int_init_var) |
| void | nkf_state_projection (nkf_t *kf, u8 num_old_non_ref_sats, u8 num_new_non_ref_sats, u8 *ndx_of_new_sat_in_old) |
| void | nkf_update (nkf_t *kf, double *measurements) |
| void | rebase_covariance_sigma (double *state_cov, u8 num_sats, u8 *old_prns, u8 *new_prns) |
| void | rebase_covariance_udu (double *state_cov_U, double *state_cov_D, u8 num_sats, u8 *old_prns, u8 *new_prns) |
| void | rebase_mean_N (double *mean, u8 num_sats, u8 *old_prns, u8 *new_prns) |
| void | rebase_nkf (nkf_t *kf, u8 num_sats, u8 *old_prns, u8 *new_prns) |
| void | set_nkf (nkf_t *kf, double amb_drift_var, double phase_var, double code_var, double amb_init_var, u8 num_sdiffs, sdiff_t *sdiffs_with_ref_first, double *dd_measurements, double ref_ecef[3]) |
| void | set_nkf_matrices (nkf_t *kf, double phase_var, double code_var, u8 num_sdiffs, sdiff_t *sdiffs_with_ref_first, double ref_ecef[3]) |
Define Documentation
| #define MAX_OBS_DIM (2 * MAX_CHANNELS - 5) |
| #define MAX_STATE_DIM (MAX_CHANNELS - 1) |