#include <iostream>#include <gtest/gtest.h>#include <boost/shared_ptr.hpp>#include <boost/make_shared.hpp>#include "robot_instance/RobotInstanceFactory.h"#include <ros/package.h>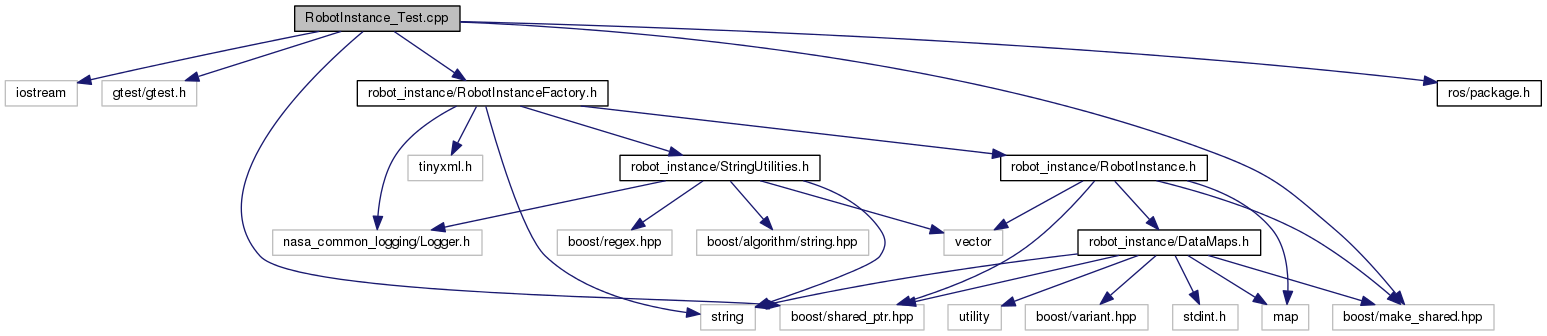
Go to the source code of this file.
Classes | |
| class | RobotInstanceTest |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (RobotInstanceTest, Factory) | |
| TEST_F (RobotInstanceTest, LiveCoeffs) | |
| TEST_F (RobotInstanceTest, Minimal) | |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 299 of file RobotInstance_Test.cpp.
| TEST_F | ( | RobotInstanceTest | , |
| Factory | |||
| ) |
total number of mechanisms
total number of devices
total number of commandable joints
total number of nodes
total number of mechanisms
total number of mechanisms
total number of mechanisms
total number of mechanisms
total number of mechanisms
total number of mechanisms
total number of mechanisms
total number of simple mechanisms
total number of gripper mechanisms
total number of simple mechanisms
total number of mechanisms
total number of complex mechanisms
total number of complex mechanism joints
total number of complex mechanism actuators
total number of devices
total number of devices
total number of devices with registers
total number of jointScheduleNodeMap
total number of joints
total number of joints
total number of components in instance file
CPF file for component
CPF file type for component
CPF file for additional properties
CPF file type for additional properties
Token files associated with nodes
Simple joint mechanism
mechanism name
mechanism type
node associated with mechanism files
register file for mechanism
class file for mechanism
calibration file for mechanism
class safety file for mechanism
joint safety file for mechanism
command file for mechanism
command file for mechanism
no separate joints in simple mechanism
no joint-node associations for simple mechanism
type of joint
no separate actuators in simple mechanism
no actuator-node associations for simple mechanism
command path for joint
Simple joint mechanism
mechanism name
node associated with mechanism files
register file for mechanism
class file for mechanism
calibration file for mechanism
safety file for mechanism
joint safety file for mechanism
command file for mechanism
command file for mechanism
no separate joints in simple mechanism
no joint-node associations for simple mechanism
type of joint
no separate actuators in simple mechanism
no actuator-node associations for simple mechanism
command path for joint
Gripper mechanism
mechanism name
node associated with mechanism files
register file for mechanism
class file for mechanism
calibration file for mechanism
safety file for mechanism
joint safety file for mechanism
command file for mechanism
command file for mechanism
setpoint file for mechanism
no separate joints in simple mechanism
no joint-node associations for simple mechanism
type of joint
no separate actuators in simple mechanism
no actuator-node associations for simple mechanism
command path for joint
Simple joint mechanism
mechanism name
node associated with mechanism files
register file for mechanism
class file for mechanism
calibration file for mechanism
safety file for mechanism
joint safety file for mechanism
command file for mechanism
command file for mechanism
no separate joints in simple mechanism
no joint-node associations for simple mechanism
type of joint
no separate actuators in simple mechanism
no actuator-node associations for simple mechanism
command path for joint
Finger (thumb) mechanism
no node associated, because control loop is closed at brainstem
joint safety file for mechanism
- Todo:
- Finger (primary) mechanism
- Todo:
- Finger (secondary) mechanism
Wrist mechanism
no node associated, because control loop is closed at brainstem
joint safety file for mechanism
command file for mechanism
device has no registers
Definition at line 29 of file RobotInstance_Test.cpp.
| TEST_F | ( | RobotInstanceTest | , |
| LiveCoeffs | |||
| ) |
Definition at line 274 of file RobotInstance_Test.cpp.
| TEST_F | ( | RobotInstanceTest | , |
| Minimal | |||
| ) |
Definition at line 293 of file RobotInstance_Test.cpp.