#include <joint_handle.h>
Public Member Functions | |
| virtual double | getEffort () |
| Get applied effort of a joint in Nm or N. | |
| virtual double | getEffortMax () |
| Get the maximum effort command. | |
| virtual std::string | getName () |
| Get the name of this joint. | |
| virtual double | getPosition () |
| Get the position of the joint in radians or meters. | |
| virtual double | getPositionMax () |
| Get the maximum valid position command. | |
| virtual double | getPositionMin () |
| Get the minimum valid position command. | |
| virtual double | getVelocity () |
| Get the velocity of the joint in rad/sec or meters/sec. | |
| virtual double | getVelocityMax () |
| Get the maximum velocity command. | |
| virtual bool | isContinuous () |
| JointHandle (physics::JointPtr &joint, const double velocity_limit, const double effort_limit, const bool continuous) | |
| virtual void | reset () |
| Reset the command. | |
| virtual void | setEffort (double effort) |
| Set an effort command for this joint. | |
| virtual void | setPosition (double position, double velocity, double effort) |
| Set a position command for this joint. | |
| virtual void | setVelocity (double velocity, double effort) |
| Set a velocity command for this joint. | |
| void | update (const ros::Time now, const ros::Duration dt) |
| Actually apply updates to gazebo. | |
| virtual | ~JointHandle () |
Private Types | |
| enum | CommandState { MODE_DISABLED, MODE_CONTROL_EFFORT, MODE_CONTROL_VELOCITY, MODE_CONTROL_POSITION } |
Private Member Functions | |
| JointHandle (const JointHandle &) | |
| JointHandle & | operator= (const JointHandle &) |
Private Attributes | |
| double | actual_velocity_ |
| double | applied_effort_ |
| GetForce(0u) is not always right. | |
| bool | continuous_ |
| double | desired_effort_ |
| double | desired_position_ |
| double | desired_velocity_ |
| double | effort_limit_ |
| Hack for continuous joints that fail to have effort limits. | |
| physics::JointPtr | joint_ |
| int | mode_ |
| control mode | |
| control_toolbox::Pid | position_pid_ |
| double | velocity_limit_ |
| Hack for continuous joints that fail to have velocity limits. | |
| control_toolbox::Pid | velocity_pid_ |
Detailed Description
Definition at line 51 of file joint_handle.h.
Member Enumeration Documentation
enum gazebo::JointHandle::CommandState [private] |
Definition at line 53 of file joint_handle.h.
Constructor & Destructor Documentation
| gazebo::JointHandle::JointHandle | ( | physics::JointPtr & | joint, |
| const double | velocity_limit, | ||
| const double | effort_limit, | ||
| const bool | continuous | ||
| ) | [inline] |
Definition at line 62 of file joint_handle.h.
| virtual gazebo::JointHandle::~JointHandle | ( | ) | [inline, virtual] |
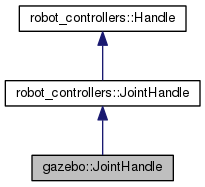
Reimplemented from robot_controllers::JointHandle.
Definition at line 81 of file joint_handle.h.
| gazebo::JointHandle::JointHandle | ( | const JointHandle & | ) | [private] |
Member Function Documentation
| virtual double gazebo::JointHandle::getEffort | ( | ) | [inline, virtual] |
Get applied effort of a joint in Nm or N.
Implements robot_controllers::JointHandle.
Definition at line 143 of file joint_handle.h.
| virtual double gazebo::JointHandle::getEffortMax | ( | ) | [inline, virtual] |
Get the maximum effort command.
Implements robot_controllers::JointHandle.
Definition at line 176 of file joint_handle.h.
| virtual std::string gazebo::JointHandle::getName | ( | ) | [inline, virtual] |
Get the name of this joint.
Implements robot_controllers::JointHandle.
Definition at line 193 of file joint_handle.h.
| virtual double gazebo::JointHandle::getPosition | ( | ) | [inline, virtual] |
Get the position of the joint in radians or meters.
Implements robot_controllers::JointHandle.
Definition at line 127 of file joint_handle.h.
| virtual double gazebo::JointHandle::getPositionMax | ( | ) | [inline, virtual] |
Get the maximum valid position command.
Implements robot_controllers::JointHandle.
Definition at line 161 of file joint_handle.h.
| virtual double gazebo::JointHandle::getPositionMin | ( | ) | [inline, virtual] |
Get the minimum valid position command.
Implements robot_controllers::JointHandle.
Definition at line 155 of file joint_handle.h.
| virtual double gazebo::JointHandle::getVelocity | ( | ) | [inline, virtual] |
Get the velocity of the joint in rad/sec or meters/sec.
Implements robot_controllers::JointHandle.
Definition at line 137 of file joint_handle.h.
| virtual double gazebo::JointHandle::getVelocityMax | ( | ) | [inline, virtual] |
Get the maximum velocity command.
Implements robot_controllers::JointHandle.
Definition at line 167 of file joint_handle.h.
| virtual bool gazebo::JointHandle::isContinuous | ( | ) | [inline, virtual] |
Implements robot_controllers::JointHandle.
Definition at line 149 of file joint_handle.h.
| JointHandle& gazebo::JointHandle::operator= | ( | const JointHandle & | ) | [private] |
| virtual void gazebo::JointHandle::reset | ( | ) | [inline, virtual] |
Reset the command.
Implements robot_controllers::JointHandle.
Definition at line 199 of file joint_handle.h.
| virtual void gazebo::JointHandle::setEffort | ( | double | effort | ) | [inline, virtual] |
Set an effort command for this joint.
- Parameters:
-
effort Effort command in Nm or N.
Implements robot_controllers::JointHandle.
Definition at line 118 of file joint_handle.h.
| virtual void gazebo::JointHandle::setPosition | ( | double | position, |
| double | velocity, | ||
| double | effort | ||
| ) | [inline, virtual] |
Set a position command for this joint.
- Parameters:
-
position Position command in radians or meters. velocity Velocity command in rad/sec or meters/sec. effort Effort command in Nm or N.
Implements robot_controllers::JointHandle.
Definition at line 91 of file joint_handle.h.
| virtual void gazebo::JointHandle::setVelocity | ( | double | velocity, |
| double | effort | ||
| ) | [inline, virtual] |
Set a velocity command for this joint.
- Parameters:
-
velocity Velocity command in rad/sec or meters/sec. effort Effort command in Nm or N.
Implements robot_controllers::JointHandle.
Definition at line 106 of file joint_handle.h.
| void gazebo::JointHandle::update | ( | const ros::Time | now, |
| const ros::Duration | dt | ||
| ) | [inline] |
Actually apply updates to gazebo.
Definition at line 208 of file joint_handle.h.
Member Data Documentation
double gazebo::JointHandle::actual_velocity_ [private] |
Definition at line 263 of file joint_handle.h.
double gazebo::JointHandle::applied_effort_ [private] |
GetForce(0u) is not always right.
Definition at line 262 of file joint_handle.h.
bool gazebo::JointHandle::continuous_ [private] |
Definition at line 259 of file joint_handle.h.
double gazebo::JointHandle::desired_effort_ [private] |
Definition at line 244 of file joint_handle.h.
double gazebo::JointHandle::desired_position_ [private] |
Definition at line 242 of file joint_handle.h.
double gazebo::JointHandle::desired_velocity_ [private] |
Definition at line 243 of file joint_handle.h.
double gazebo::JointHandle::effort_limit_ [private] |
Hack for continuous joints that fail to have effort limits.
Definition at line 256 of file joint_handle.h.
physics::JointPtr gazebo::JointHandle::joint_ [private] |
Definition at line 240 of file joint_handle.h.
int gazebo::JointHandle::mode_ [private] |
control mode
Definition at line 247 of file joint_handle.h.
Definition at line 249 of file joint_handle.h.
double gazebo::JointHandle::velocity_limit_ [private] |
Hack for continuous joints that fail to have velocity limits.
Definition at line 253 of file joint_handle.h.
Definition at line 250 of file joint_handle.h.
The documentation for this class was generated from the following file: