#include <ros/ros.h>#include "bcap_core/bcap_funcid.h"#include "bcap_service/bcap_service.h"#include <std_msgs/Int32.h>#include <std_msgs/Float32.h>#include <std_msgs/Float64.h>#include <std_msgs/String.h>#include <std_msgs/Bool.h>#include <std_msgs/Float32MultiArray.h>#include <std_msgs/Float64MultiArray.h>#include "denso_robot_core/Joints.h"#include "denso_robot_core/ExJoints.h"#include "denso_robot_core/PoseData.h"#include "denso_robot_core/UserIO.h"#include <actionlib/server/simple_action_server.h>#include "denso_robot_core/MoveStringAction.h"#include "denso_robot_core/MoveValueAction.h"#include "denso_robot_core/DriveStringAction.h"#include "denso_robot_core/DriveValueAction.h"#include "denso_robot_core/tinyxml2.h"
Include dependency graph for denso_base.h:

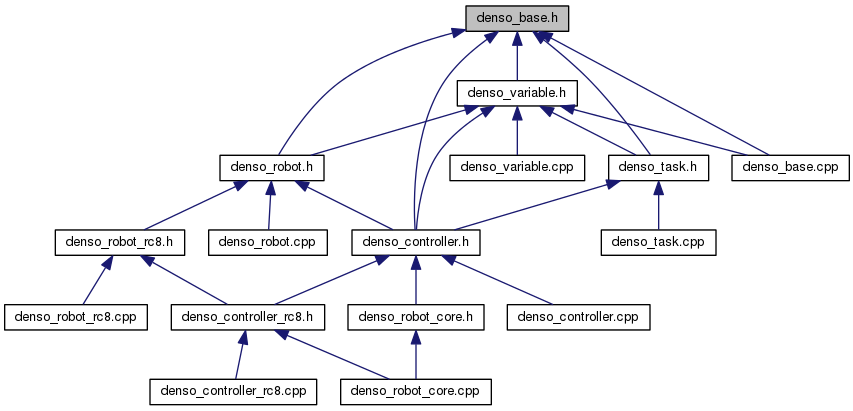
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | denso_robot_core::DensoBase |
Namespaces | |
| namespace | denso_robot_core |
Defines | |
| #define | BCAP_VAR_DEFAULT_DURATION (1000) /* [ms] */ |
| #define | MESSAGE_QUEUE (1) |
Typedefs | |
| typedef boost::shared_ptr < DensoBase > | denso_robot_core::DensoBase_Ptr |
| typedef std::vector < DensoBase_Ptr > | denso_robot_core::DensoBase_Vec |
| typedef std::vector< uint32_t > | denso_robot_core::Handle_Vec |
| typedef std::vector< std::string > | denso_robot_core::Name_Vec |
| typedef std::vector < BCAPService_Ptr > | denso_robot_core::Service_Vec |
Define Documentation
| #define BCAP_VAR_DEFAULT_DURATION (1000) /* [ms] */ |
Definition at line 62 of file denso_base.h.
| #define MESSAGE_QUEUE (1) |
Definition at line 61 of file denso_base.h.