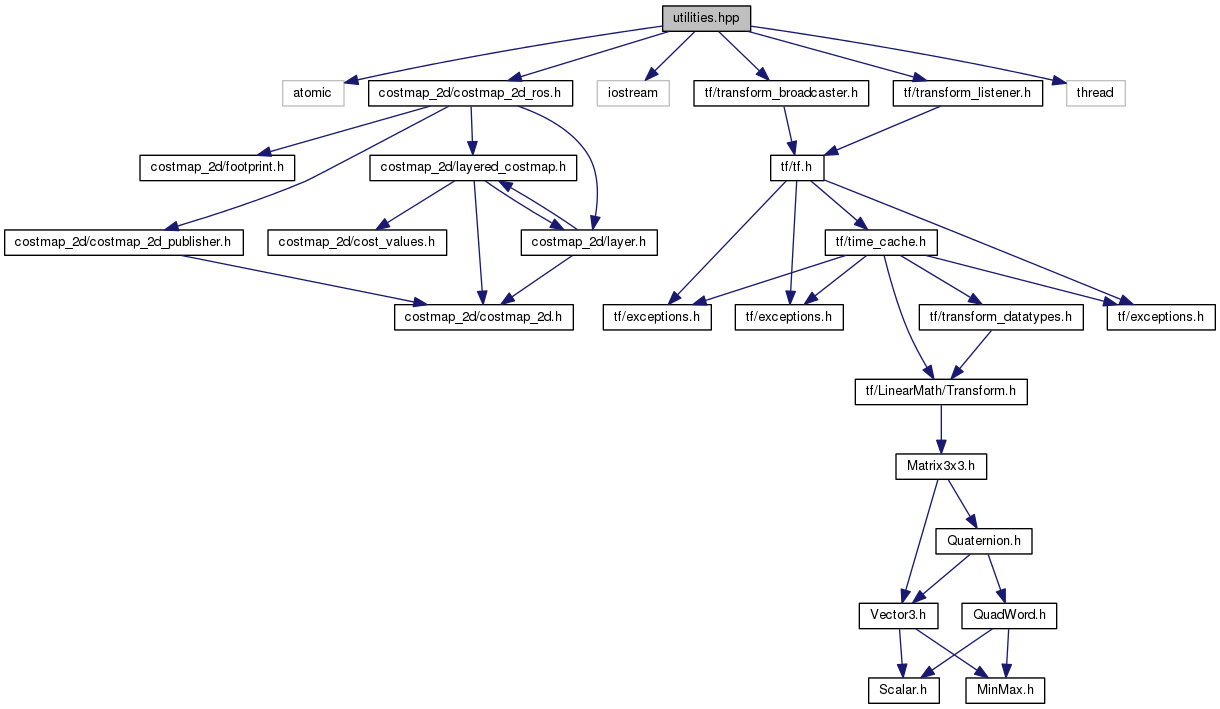
#include <atomic>#include <costmap_2d/costmap_2d_ros.h>#include <iostream>#include <tf/transform_broadcaster.h>#include <tf/transform_listener.h>#include <thread>
Include dependency graph for utilities.hpp:
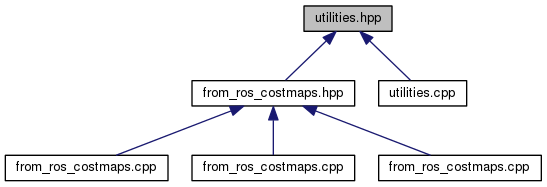
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cost_map_demos::TransformBroadcaster |
| Broadcast a set of transforms useful for various demos. More... | |
Namespaces | |
| namespace | cost_map_demos |
Functions | |
| std::ostream & | cost_map_demos::operator<< (std::ostream &stream, costmap_2d::Costmap2DROS &ros_costmap) |
| Pretty print a ros cost map in ascii format to stdout. | |
| void | cost_map_demos::pretty_print (costmap_2d::Costmap2DROS &ros_costmap) |
| Pretty print a ros cost map in ascii format to stdout. | |
Detailed Description
Definition in file utilities.hpp.