#include <Eigen/Dense>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/visualization/pcl_visualizer.h>#include <vector>
Include dependency graph for quadric.h:

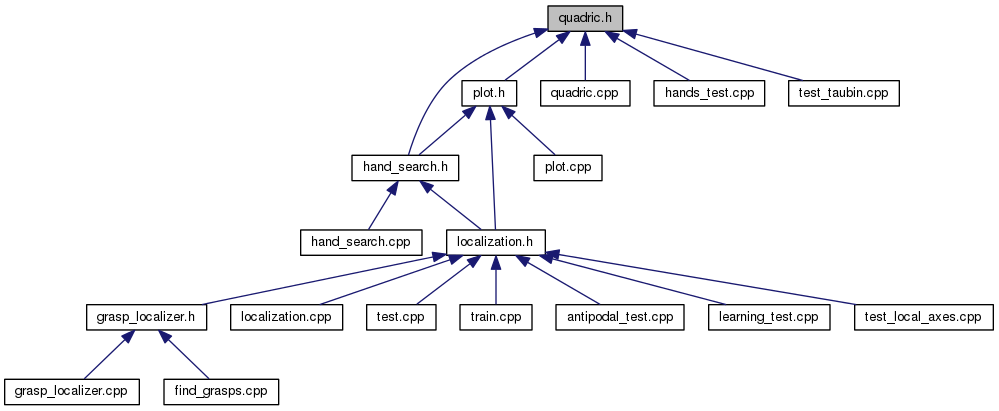
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Quadric |
| Quadratic surface fit and local axes estimation. More... | |
Typedefs | |
| typedef pcl::PointCloud < pcl::PointXYZRGBA > | PointCloud |
Functions | |
| void | dggev_ (const char *JOBVL, const char *JOBVR, const int *N, const double *A, const int *LDA, const double *B, const int *LDB, double *ALPHAR, double *ALPHAI, double *BETA, double *VL, const int *LDVL, double *VR, const int *LDVR, double *WORK, const int *LWORK, int *INFO) |
Typedef Documentation
| typedef pcl::PointCloud<pcl::PointXYZRGBA> PointCloud |
Function Documentation
| void dggev_ | ( | const char * | JOBVL, |
| const char * | JOBVR, | ||
| const int * | N, | ||
| const double * | A, | ||
| const int * | LDA, | ||
| const double * | B, | ||
| const int * | LDB, | ||
| double * | ALPHAR, | ||
| double * | ALPHAI, | ||
| double * | BETA, | ||
| double * | VL, | ||
| const int * | LDVL, | ||
| double * | VR, | ||
| const int * | LDVR, | ||
| double * | WORK, | ||
| const int * | LWORK, | ||
| int * | INFO | ||
| ) |
Lapack function to solve the generalized eigenvalue problem