#include <spi_base_controller.hpp>
Public Member Functions | |
| virtual bool | init (ros_ethercat_model::RobotState *robot, ros::NodeHandle &n) |
| SPIBaseController () | |
| virtual void | starting (const ros::Time &) |
| virtual void | update (const ros::Time &, const ros::Duration &) |
| Issues commands to the joint. Should be called at regular intervals. | |
Protected Member Functions | |
| void | copy_splitted_to_cmd_ (uint16_t spi_index) |
| bool | pre_init_ (ros_ethercat_model::RobotState *robot, ros::NodeHandle &n) |
Protected Attributes | |
| uint16_t | cmd_pin_output_states_post_ |
| uint16_t | cmd_pin_output_states_pre_ |
| std::vector< std::queue < SplittedSPICommand * > > | command_queue_ |
| int | loop_count_ |
| ros::NodeHandle | node_ |
| ronex::SPI * | spi_ |
| std::vector< std::queue < std::pair < SplittedSPICommand *, SPI_PACKET_IN * > > > | status_queue_ |
| std::string | topic_prefix_ |
| prefix used for creating topics / services | |
Private Attributes | |
| bool | new_command |
Detailed Description
Definition at line 51 of file spi_base_controller.hpp.
Constructor & Destructor Documentation
Definition at line 29 of file spi_base_controller.cpp.
Member Function Documentation
| void ronex::SPIBaseController::copy_splitted_to_cmd_ | ( | uint16_t | spi_index | ) | [protected] |
Definition at line 138 of file spi_base_controller.cpp.
| bool ronex::SPIBaseController::init | ( | ros_ethercat_model::RobotState * | robot, |
| ros::NodeHandle & | n | ||
| ) | [virtual] |
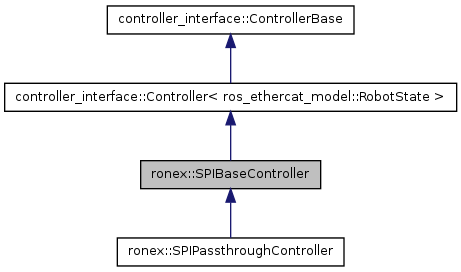
Reimplemented from controller_interface::Controller< ros_ethercat_model::RobotState >.
Reimplemented in ronex::SPIPassthroughController.
Definition at line 33 of file spi_base_controller.cpp.
| bool ronex::SPIBaseController::pre_init_ | ( | ros_ethercat_model::RobotState * | robot, |
| ros::NodeHandle & | n | ||
| ) | [protected] |
Definition at line 38 of file spi_base_controller.cpp.
| void ronex::SPIBaseController::starting | ( | const ros::Time & | ) | [virtual] |
Reimplemented from controller_interface::ControllerBase.
Definition at line 81 of file spi_base_controller.cpp.
| void ronex::SPIBaseController::update | ( | const ros::Time & | , |
| const ros::Duration & | |||
| ) | [virtual] |
Issues commands to the joint. Should be called at regular intervals.
Implements controller_interface::ControllerBase.
Definition at line 89 of file spi_base_controller.cpp.
Member Data Documentation
uint16_t ronex::SPIBaseController::cmd_pin_output_states_post_ [protected] |
Definition at line 80 of file spi_base_controller.hpp.
uint16_t ronex::SPIBaseController::cmd_pin_output_states_pre_ [protected] |
Definition at line 79 of file spi_base_controller.hpp.
std::vector<std::queue<SplittedSPICommand*> > ronex::SPIBaseController::command_queue_ [protected] |
Definition at line 76 of file spi_base_controller.hpp.
int ronex::SPIBaseController::loop_count_ [protected] |
Definition at line 72 of file spi_base_controller.hpp.
bool ronex::SPIBaseController::new_command [private] |
Definition at line 86 of file spi_base_controller.hpp.
ros::NodeHandle ronex::SPIBaseController::node_ [protected] |
Definition at line 67 of file spi_base_controller.hpp.
ronex::SPI* ronex::SPIBaseController::spi_ [protected] |
Definition at line 74 of file spi_base_controller.hpp.
std::vector<std::queue<std::pair<SplittedSPICommand*, SPI_PACKET_IN* > > > ronex::SPIBaseController::status_queue_ [protected] |
Definition at line 77 of file spi_base_controller.hpp.
std::string ronex::SPIBaseController::topic_prefix_ [protected] |
prefix used for creating topics / services
Definition at line 70 of file spi_base_controller.hpp.
The documentation for this class was generated from the following files: