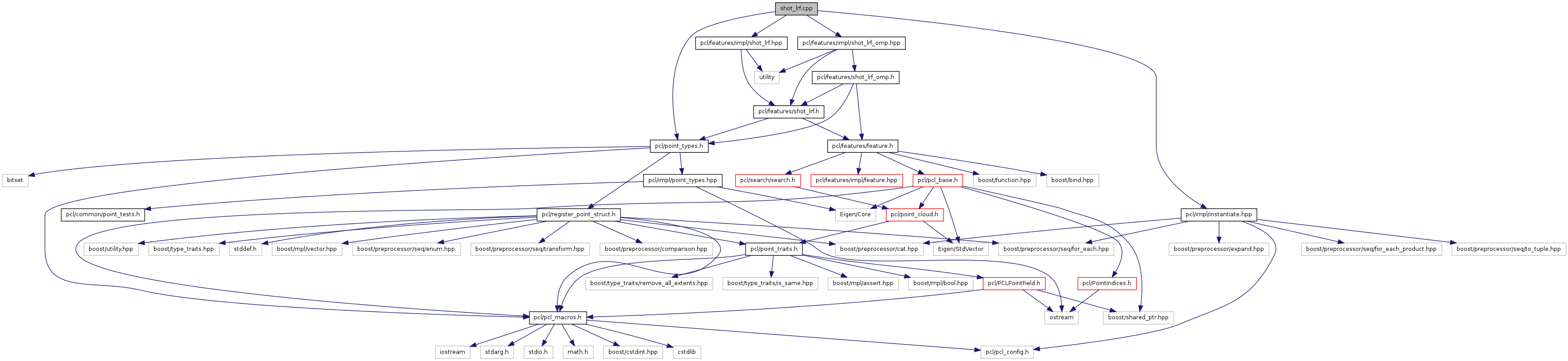
#include <pcl/features/impl/shot_lrf.hpp>#include <pcl/features/impl/shot_lrf_omp.hpp>#include <pcl/point_types.h>#include <pcl/impl/instantiate.hpp>
Include dependency graph for shot_lrf.cpp:
Go to the source code of this file.
Functions | |
| PCL_INSTANTIATE_PRODUCT (SHOTLocalReferenceFrameEstimation,(PCL_XYZ_POINT_TYPES)((pcl::ReferenceFrame))) PCL_INSTANTIATE_PRODUCT(SHOTLocalReferenceFrameEstimationOMP | |
Function Documentation
| PCL_INSTANTIATE_PRODUCT | ( | SHOTLocalReferenceFrameEstimation | , |
| (PCL_XYZ_POINT_TYPES)((pcl::ReferenceFrame)) | |||
| ) |