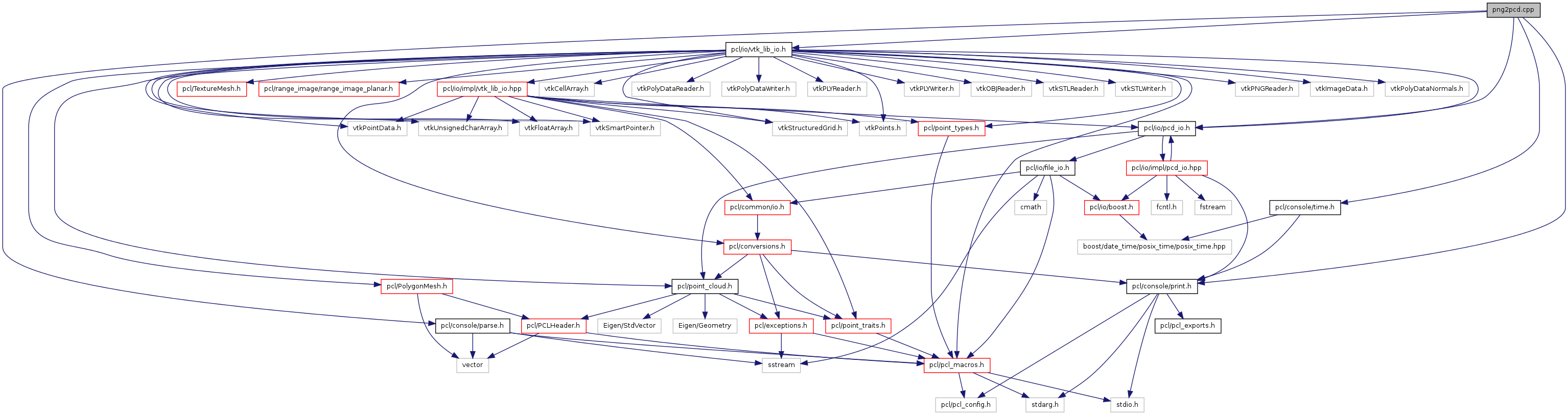
#include <pcl/io/pcd_io.h>#include <pcl/console/time.h>#include <pcl/console/print.h>#include <pcl/console/parse.h>#include <pcl/io/vtk_lib_io.h>
Include dependency graph for png2pcd.cpp:
Go to the source code of this file.
Defines | |
| #define | BLUE_MULTIPLIER 0.114 |
| #define | GREEN_MULTIPLIER 0.587 |
| #define | MAX_COLOR_INTENSITY 255 |
| #define | RED_MULTIPLIER 0.299 |
| PNG 2 PCD converter. | |
Functions | |
| int | main (int argc, char **argv) |
| void | printHelp (int, char **argv) |
| template<typename PointInT > | |
| void | saveCloud (const std::string &filename, const PointCloud< PointInT > &cloud, bool format) |
Define Documentation
| #define BLUE_MULTIPLIER 0.114 |
Definition at line 58 of file png2pcd.cpp.
| #define GREEN_MULTIPLIER 0.587 |
Definition at line 57 of file png2pcd.cpp.
| #define MAX_COLOR_INTENSITY 255 |
Definition at line 59 of file png2pcd.cpp.
| #define RED_MULTIPLIER 0.299 |
PNG 2 PCD converter.
This converter takes two input: the name of the input PNG file and the name of the output PCD file. It performs the conversion of the PNG file into the PCD file by creating a pcl::PointCloud<pcl::RGB>> point cloud.
Definition at line 56 of file png2pcd.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 95 of file png2pcd.cpp.
| void printHelp | ( | int | , |
| char ** | argv | ||
| ) |
Definition at line 66 of file png2pcd.cpp.
template<typename PointInT >
| void saveCloud | ( | const std::string & | filename, |
| const PointCloud< PointInT > & | cloud, | ||
| bool | format | ||
| ) |
Definition at line 83 of file png2pcd.cpp.