#include <boost/make_shared.hpp>#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl/point_representation.h>#include <pcl/io/pcd_io.h>#include <pcl/filters/voxel_grid.h>#include <pcl/filters/filter.h>#include <pcl/features/normal_3d.h>#include <pcl/registration/icp.h>#include <pcl/registration/icp_nl.h>#include <pcl/registration/transforms.h>#include <pcl/visualization/pcl_visualizer.h>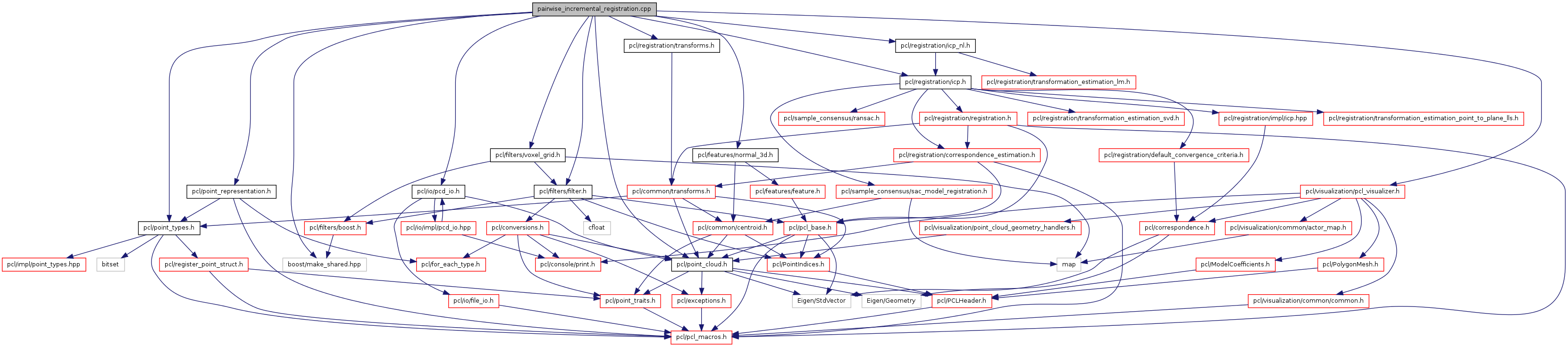
Go to the source code of this file.
Classes | |
| class | MyPointRepresentation |
| struct | PCD |
| struct | PCDComparator |
Typedefs | |
| typedef pcl::PointCloud< PointT > | PointCloud |
| typedef pcl::PointCloud < PointNormalT > | PointCloudWithNormals |
| typedef pcl::PointNormal | PointNormalT |
| typedef pcl::PointXYZ | PointT |
Functions | |
| void | loadData (int argc, char **argv, std::vector< PCD, Eigen::aligned_allocator< PCD > > &models) |
| Load a set of PCD files that we want to register together. | |
| int | main (int argc, char **argv) |
| void | pairAlign (const PointCloud::Ptr cloud_src, const PointCloud::Ptr cloud_tgt, PointCloud::Ptr output, Eigen::Matrix4f &final_transform, bool downsample=false) |
| Align a pair of PointCloud datasets and return the result. | |
| void | showCloudsLeft (const PointCloud::Ptr cloud_target, const PointCloud::Ptr cloud_source) |
| Display source and target on the first viewport of the visualizer. | |
| void | showCloudsRight (const PointCloudWithNormals::Ptr cloud_target, const PointCloudWithNormals::Ptr cloud_source) |
| Display source and target on the second viewport of the visualizer. | |
Variables | |
| pcl::visualization::PCLVisualizer * | p |
| int | vp_1 |
| int | vp_2 |
Typedef Documentation
| typedef pcl::PointCloud<PointT> PointCloud |
Definition at line 64 of file pairwise_incremental_registration.cpp.
Definition at line 66 of file pairwise_incremental_registration.cpp.
| typedef pcl::PointNormal PointNormalT |
Definition at line 65 of file pairwise_incremental_registration.cpp.
| typedef pcl::PointXYZ PointT |
Definition at line 63 of file pairwise_incremental_registration.cpp.
Function Documentation
| void loadData | ( | int | argc, |
| char ** | argv, | ||
| std::vector< PCD, Eigen::aligned_allocator< PCD > > & | models | ||
| ) |
Load a set of PCD files that we want to register together.
- Parameters:
-
argc the number of arguments (pass from main ()) argv the actual command line arguments (pass from main ()) models the resultant vector of point cloud datasets
Definition at line 165 of file pairwise_incremental_registration.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 326 of file pairwise_incremental_registration.cpp.
| void pairAlign | ( | const PointCloud::Ptr | cloud_src, |
| const PointCloud::Ptr | cloud_tgt, | ||
| PointCloud::Ptr | output, | ||
| Eigen::Matrix4f & | final_transform, | ||
| bool | downsample = false |
||
| ) |
Align a pair of PointCloud datasets and return the result.
- Parameters:
-
cloud_src the source PointCloud cloud_tgt the target PointCloud output the resultant aligned source PointCloud final_transform the resultant transform between source and target
Definition at line 202 of file pairwise_incremental_registration.cpp.
| void showCloudsLeft | ( | const PointCloud::Ptr | cloud_target, |
| const PointCloud::Ptr | cloud_source | ||
| ) |
Display source and target on the first viewport of the visualizer.
Definition at line 119 of file pairwise_incremental_registration.cpp.
| void showCloudsRight | ( | const PointCloudWithNormals::Ptr | cloud_target, |
| const PointCloudWithNormals::Ptr | cloud_source | ||
| ) |
Display source and target on the second viewport of the visualizer.
Definition at line 138 of file pairwise_incremental_registration.cpp.
Variable Documentation
Definition at line 70 of file pairwise_incremental_registration.cpp.
| int vp_1 |
Definition at line 72 of file pairwise_incremental_registration.cpp.
| int vp_2 |
Definition at line 72 of file pairwise_incremental_registration.cpp.