The marching cubes surface reconstruction algorithm. This is an abstract class that takes a grid and extracts the isosurface as a mesh, based on the original marching cubes paper: More...
#include <marching_cubes.h>
Public Types | |
| typedef boost::shared_ptr < const MarchingCubes< PointNT > > | ConstPtr |
| typedef pcl::KdTree< PointNT > | KdTree |
| typedef pcl::KdTree< PointNT >::Ptr | KdTreePtr |
| typedef pcl::PointCloud < PointNT >::Ptr | PointCloudPtr |
| typedef boost::shared_ptr < MarchingCubes< PointNT > > | Ptr |
Public Member Functions | |
| void | getGridResolution (int &res_x, int &res_y, int &res_z) |
| Method to get the marching cubes grid resolution. | |
| float | getIsoLevel () |
| Method that returns the iso level of the surface to be extracted. | |
| float | getPercentageExtendGrid () |
| Method that gets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box. | |
| MarchingCubes () | |
| Constructor. | |
| void | setGridResolution (int res_x, int res_y, int res_z) |
| Method that sets the marching cubes grid resolution. | |
| void | setIsoLevel (float iso_level) |
| Method that sets the iso level of the surface to be extracted. | |
| void | setPercentageExtendGrid (float percentage) |
| Method that sets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits. Does not affect the resolution of the grid, it just changes the voxel size accordingly. | |
| virtual | ~MarchingCubes () |
| Destructor. | |
Protected Member Functions | |
| void | createSurface (std::vector< float > &leaf_node, Eigen::Vector3i &index_3d, pcl::PointCloud< PointNT > &cloud) |
| Calculate out the corresponding polygons in the leaf node. | |
| void | getBoundingBox () |
| Get the bounding box for the input data points. | |
| std::string | getClassName () const |
| Class get name method. | |
| virtual float | getGridValue (Eigen::Vector3i pos) |
| Method that returns the scalar value at the given grid position. | |
| void | getNeighborList1D (std::vector< float > &leaf, Eigen::Vector3i &index3d) |
| Method that returns the scalar values of the neighbors of a given 3D position in the grid. | |
| void | interpolateEdge (Eigen::Vector3f &p1, Eigen::Vector3f &p2, float val_p1, float val_p2, Eigen::Vector3f &output) |
| Interpolate along the voxel edge. | |
| virtual void | performReconstruction (pcl::PolygonMesh &output) |
| Extract the surface. | |
| virtual void | performReconstruction (pcl::PointCloud< PointNT > &points, std::vector< pcl::Vertices > &polygons) |
| Extract the surface. | |
| virtual void | voxelizeData ()=0 |
| Convert the point cloud into voxel data. | |
Protected Attributes | |
| std::vector< float > | grid_ |
| The data structure storing the 3D grid. | |
| float | iso_level_ |
| The iso level to be extracted. | |
| Eigen::Vector4f | max_p_ |
| Eigen::Vector4f | min_p_ |
| Min and max data points. | |
| float | percentage_extend_grid_ |
| Parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box. | |
| int | res_x_ |
| The grid resolution. | |
| int | res_y_ |
| int | res_z_ |
Detailed Description
template<typename PointNT>
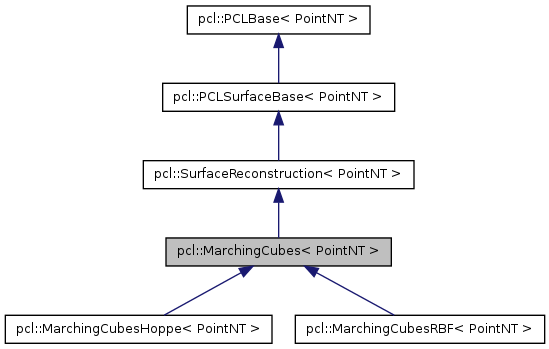
class pcl::MarchingCubes< PointNT >
The marching cubes surface reconstruction algorithm. This is an abstract class that takes a grid and extracts the isosurface as a mesh, based on the original marching cubes paper:
Lorensen W.E., Cline H.E., "Marching cubes: A high resolution 3d surface construction algorithm", SIGGRAPH '87
Definition at line 363 of file marching_cubes.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const MarchingCubes<PointNT> > pcl::MarchingCubes< PointNT >::ConstPtr |
Reimplemented from pcl::SurfaceReconstruction< PointNT >.
Reimplemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 367 of file marching_cubes.h.
| typedef pcl::KdTree<PointNT> pcl::MarchingCubes< PointNT >::KdTree |
Reimplemented from pcl::PCLSurfaceBase< PointNT >.
Reimplemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 374 of file marching_cubes.h.
| typedef pcl::KdTree<PointNT>::Ptr pcl::MarchingCubes< PointNT >::KdTreePtr |
Reimplemented from pcl::PCLSurfaceBase< PointNT >.
Reimplemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 375 of file marching_cubes.h.
| typedef pcl::PointCloud<PointNT>::Ptr pcl::MarchingCubes< PointNT >::PointCloudPtr |
Reimplemented from pcl::PCLBase< PointNT >.
Reimplemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 372 of file marching_cubes.h.
| typedef boost::shared_ptr<MarchingCubes<PointNT> > pcl::MarchingCubes< PointNT >::Ptr |
Reimplemented from pcl::SurfaceReconstruction< PointNT >.
Reimplemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 366 of file marching_cubes.h.
Constructor & Destructor Documentation
| pcl::MarchingCubes< PointNT >::MarchingCubes | ( | ) |
Constructor.
Definition at line 47 of file marching_cubes.hpp.
| pcl::MarchingCubes< PointNT >::~MarchingCubes | ( | ) | [virtual] |
Destructor.
Definition at line 54 of file marching_cubes.hpp.
Member Function Documentation
| void pcl::MarchingCubes< PointNT >::createSurface | ( | std::vector< float > & | leaf_node, |
| Eigen::Vector3i & | index_3d, | ||
| pcl::PointCloud< PointNT > & | cloud | ||
| ) | [protected] |
Calculate out the corresponding polygons in the leaf node.
- Parameters:
-
leaf_node the leaf node to be checked index_3d the 3d index of the leaf node to be checked cloud point cloud to store the vertices of the polygon
Definition at line 100 of file marching_cubes.hpp.
| void pcl::MarchingCubes< PointNT >::getBoundingBox | ( | ) | [protected] |
Get the bounding box for the input data points.
Definition at line 60 of file marching_cubes.hpp.
| std::string pcl::MarchingCubes< PointNT >::getClassName | ( | ) | const [inline, protected, virtual] |
Class get name method.
Reimplemented from pcl::PCLSurfaceBase< PointNT >.
Definition at line 495 of file marching_cubes.h.
| void pcl::MarchingCubes< PointNT >::getGridResolution | ( | int & | res_x, |
| int & | res_y, | ||
| int & | res_z | ||
| ) | [inline] |
Method to get the marching cubes grid resolution.
- Parameters:
-
[in] res_x the resolution of the grid along the x-axis [in] res_y the resolution of the grid along the y-axis [in] res_z the resolution of the grid along the z-axis
Definition at line 413 of file marching_cubes.h.
| float pcl::MarchingCubes< PointNT >::getGridValue | ( | Eigen::Vector3i | pos | ) | [protected, virtual] |
Method that returns the scalar value at the given grid position.
- Parameters:
-
[in] pos The 3D position in the grid
TODO what to return?
Definition at line 209 of file marching_cubes.hpp.
| float pcl::MarchingCubes< PointNT >::getIsoLevel | ( | ) | [inline] |
Method that returns the iso level of the surface to be extracted.
Definition at line 394 of file marching_cubes.h.
| void pcl::MarchingCubes< PointNT >::getNeighborList1D | ( | std::vector< float > & | leaf, |
| Eigen::Vector3i & | index3d | ||
| ) | [protected] |
Method that returns the scalar values of the neighbors of a given 3D position in the grid.
- Parameters:
-
[in] index3d the point in the grid [out] leaf the set of values
Definition at line 191 of file marching_cubes.hpp.
| float pcl::MarchingCubes< PointNT >::getPercentageExtendGrid | ( | ) | [inline] |
Method that gets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box.
Definition at line 430 of file marching_cubes.h.
| void pcl::MarchingCubes< PointNT >::interpolateEdge | ( | Eigen::Vector3f & | p1, |
| Eigen::Vector3f & | p2, | ||
| float | val_p1, | ||
| float | val_p2, | ||
| Eigen::Vector3f & | output | ||
| ) | [protected] |
Interpolate along the voxel edge.
- Parameters:
-
[in] p1 The first point on the edge [in] p2 The second point on the edge [in] val_p1 The scalar value at p1 [in] val_p2 The scalar value at p2 [out] output The interpolated point along the edge
Definition at line 87 of file marching_cubes.hpp.
| void pcl::MarchingCubes< PointNT >::performReconstruction | ( | pcl::PolygonMesh & | output | ) | [protected, virtual] |
Extract the surface.
- Parameters:
-
[out] output the resultant polygonal mesh
Implements pcl::SurfaceReconstruction< PointNT >.
Definition at line 225 of file marching_cubes.hpp.
| void pcl::MarchingCubes< PointNT >::performReconstruction | ( | pcl::PointCloud< PointNT > & | points, |
| std::vector< pcl::Vertices > & | polygons | ||
| ) | [protected, virtual] |
Extract the surface.
- Parameters:
-
[out] points the points of the extracted mesh [out] polygons the connectivity between the point of the extracted mesh.
Implements pcl::SurfaceReconstruction< PointNT >.
Definition at line 279 of file marching_cubes.hpp.
| void pcl::MarchingCubes< PointNT >::setGridResolution | ( | int | res_x, |
| int | res_y, | ||
| int | res_z | ||
| ) | [inline] |
Method that sets the marching cubes grid resolution.
- Parameters:
-
[in] res_x the resolution of the grid along the x-axis [in] res_y the resolution of the grid along the y-axis [in] res_z the resolution of the grid along the z-axis
Definition at line 403 of file marching_cubes.h.
| void pcl::MarchingCubes< PointNT >::setIsoLevel | ( | float | iso_level | ) | [inline] |
Method that sets the iso level of the surface to be extracted.
- Parameters:
-
[in] iso_level the iso level.
Definition at line 389 of file marching_cubes.h.
| void pcl::MarchingCubes< PointNT >::setPercentageExtendGrid | ( | float | percentage | ) | [inline] |
Method that sets the parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits. Does not affect the resolution of the grid, it just changes the voxel size accordingly.
- Parameters:
-
[in] percentage the percentage of the bounding box that should be left empty between the bounding box and the grid limits.
Definition at line 423 of file marching_cubes.h.
| virtual void pcl::MarchingCubes< PointNT >::voxelizeData | ( | ) | [protected, pure virtual] |
Convert the point cloud into voxel data.
Implemented in pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Member Data Documentation
std::vector<float> pcl::MarchingCubes< PointNT >::grid_ [protected] |
The data structure storing the 3D grid.
Definition at line 435 of file marching_cubes.h.
float pcl::MarchingCubes< PointNT >::iso_level_ [protected] |
The iso level to be extracted.
Definition at line 448 of file marching_cubes.h.
Eigen::Vector4f pcl::MarchingCubes< PointNT >::max_p_ [protected] |
Definition at line 441 of file marching_cubes.h.
Eigen::Vector4f pcl::MarchingCubes< PointNT >::min_p_ [protected] |
Min and max data points.
Definition at line 441 of file marching_cubes.h.
float pcl::MarchingCubes< PointNT >::percentage_extend_grid_ [protected] |
Parameter that defines how much free space should be left inside the grid between the bounding box of the point cloud and the grid limits, as a percentage of the bounding box.
Definition at line 445 of file marching_cubes.h.
int pcl::MarchingCubes< PointNT >::res_x_ [protected] |
The grid resolution.
Definition at line 438 of file marching_cubes.h.
int pcl::MarchingCubes< PointNT >::res_y_ [protected] |
Definition at line 438 of file marching_cubes.h.
int pcl::MarchingCubes< PointNT >::res_z_ [protected] |
Definition at line 438 of file marching_cubes.h.
The documentation for this class was generated from the following files: