#include "roboop/source/robot.h"#include "roboop/source/utils.h"#include "roboop/source/quaternion.h"#include "AnalyticalGuess/include/kinematics6M180.h"#include "AnalyticalGuess/include/kinematics6M90G.h"#include "AnalyticalGuess/include/kinematics6M90T.h"#include "katana_common.h"#include <vector>#include <string>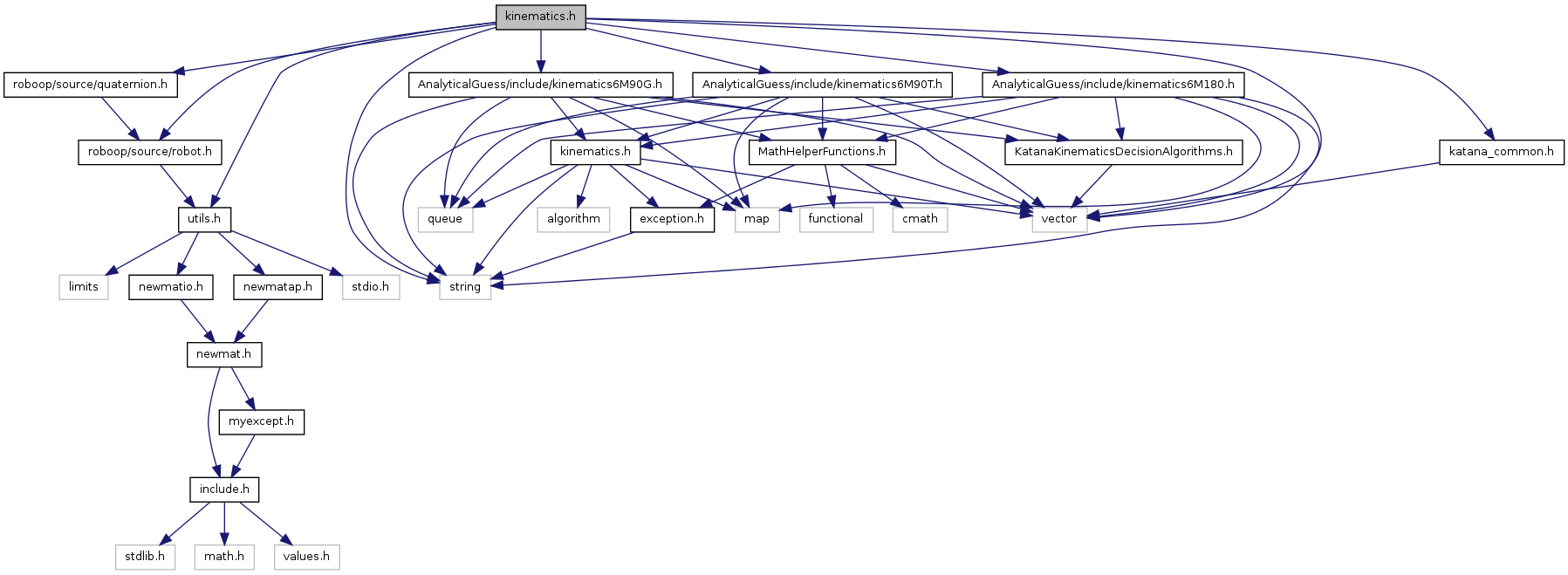
Go to the source code of this file.
Classes | |
| class | KinematicsLib |
| Kinematics class using the kinematics lib. More... | |
Defines | |
| #define | EDOM 33 |
| #define | ERANGE 34 |
| #define | KINLIB_VERSION_MAJOR 1 |
| #define | KINLIB_VERSION_MINOR 3 |
| #define | KINLIB_VERSION_REVISION 0 |
| #define | mPi 3.14159265358979323846 |
Enumerations | |
| enum | katana_type { K_6M90A_F = 0, K_6M90A_G = 1, K_6M180 = 2, K_6M90B_F = 3, K_6M90B_G = 4 } |
Functions | |
| template<typename _T > | |
| _T | atan1 (_T in1, _T in2) |
Variables | |
| const double | Angle_offset_180 [] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036} |
| const double | Angle_offset_90A_F [] = {-3.025529, 2.168572, -2.221804, 0.462512, 1.422443, 3.656465} |
| const double | Angle_offset_90A_G [] = {-3.025529, 2.168572, -2.221804, 0.462512, 1.422443, 1.570796} |
| const double | Angle_offset_90B_F [] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036, 3.656465} |
| const double | Angle_offset_90B_G [] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036, 1.570796} |
| const double | Angle_range_180 [] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026} |
| const double | Angle_range_90A_F [] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 5.742133} |
| const double | Angle_range_90A_G [] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 0.0} |
| const double | Angle_range_90B_F [] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 5.742133} |
| const double | Angle_range_90B_G [] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 0.0} |
| const int | Dof_180 = 5 |
| const int | Dof_90 = 6 |
| const int | Encoder_offset [] = {31000, -31000, -31000, 31000, 31000, 31000} |
| Encoder offset. | |
| const int | Encoder_per_cycle [] = {51200, 94976, 47488, 51200, 51200, 51200} |
| Encoder per cycle. | |
| const Real | Katana6M180_data [] |
| const Real | Katana6M90A_F_data [] |
| const Real | Katana6M90A_G_data [] |
| const Real | Katana6M90B_F_data [] |
| const Real | Katana6M90B_G_data [] |
| const double | LENGTH_MULTIPLIER = 10.0 |
| const double | Link_length_180 [] = {0.19, 0.139, 0.1473, 0.041} |
| const double | Link_length_90A_F [] = {0.19, 0.139, 0.1473, 0.036} |
| const double | Link_length_90A_G [] = {0.19, 0.139, 0.1473, 0.1505} |
| const double | Link_length_90B_F [] = {0.19, 0.139, 0.1473, 0.036} |
| const double | Link_length_90B_G [] = {0.19, 0.139, 0.1473, 0.1505} |
| const int | MaxDof = 10 |
| const int | Rotation_direction [] = {-1, -1, 1, 1, 1, 1} |
| Rotation direction. | |
Define Documentation
| #define EDOM 33 |
Definition at line 27 of file kinematics.h.
| #define ERANGE 34 |
Definition at line 28 of file kinematics.h.
| #define KINLIB_VERSION_MAJOR 1 |
Definition at line 30 of file kinematics.h.
| #define KINLIB_VERSION_MINOR 3 |
Definition at line 31 of file kinematics.h.
| #define KINLIB_VERSION_REVISION 0 |
Definition at line 32 of file kinematics.h.
| #define mPi 3.14159265358979323846 |
Definition at line 25 of file kinematics.h.
Enumeration Type Documentation
| enum katana_type |
Definition at line 55 of file kinematics.h.
Function Documentation
| _T atan1 | ( | _T | in1, |
| _T | in2 | ||
| ) | [inline] |
Definition at line 36 of file kinematics.h.
Variable Documentation
| const double Angle_offset_180[] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036} |
Definition at line 147 of file kinematics.h.
| const double Angle_offset_90A_F[] = {-3.025529, 2.168572, -2.221804, 0.462512, 1.422443, 3.656465} |
Definition at line 145 of file kinematics.h.
| const double Angle_offset_90A_G[] = {-3.025529, 2.168572, -2.221804, 0.462512, 1.422443, 1.570796} |
Definition at line 146 of file kinematics.h.
| const double Angle_offset_90B_F[] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036, 3.656465} |
Definition at line 148 of file kinematics.h.
| const double Angle_offset_90B_G[] = {-3.025529, 2.168572, -2.221804, 0.462512, 4.564036, 1.570796} |
Definition at line 149 of file kinematics.h.
| const double Angle_range_180[] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026} |
Definition at line 155 of file kinematics.h.
| const double Angle_range_90A_F[] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 5.742133} |
Definition at line 153 of file kinematics.h.
| const double Angle_range_90A_G[] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 0.0} |
Definition at line 154 of file kinematics.h.
| const double Angle_range_90B_F[] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 5.742133} |
Definition at line 156 of file kinematics.h.
| const double Angle_range_90B_G[] = {6.03884, 2.443461, 4.363323, 4.014257, 5.969026, 0.0} |
Definition at line 157 of file kinematics.h.
| const int Dof_180 = 5 |
Definition at line 75 of file kinematics.h.
| const int Dof_90 = 6 |
Definition at line 74 of file kinematics.h.
| const int Encoder_offset[] = {31000, -31000, -31000, 31000, 31000, 31000} |
Encoder offset.
Definition at line 169 of file kinematics.h.
| const int Encoder_per_cycle[] = {51200, 94976, 47488, 51200, 51200, 51200} |
Encoder per cycle.
Definition at line 167 of file kinematics.h.
| const Real Katana6M180_data[] |
{0, 0, 0, 0, 0, -3.025529, 3.013311, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, mPi/2.0, -0.274889, 2.168572, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.19, 0, -2.221804, 2.141519, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.139, 0, -3.551745, 0.462512, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.1473+0.041, 0, -mPi/2.0, -1.40499, 4.564036, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
Definition at line 121 of file kinematics.h.
| const Real Katana6M90A_F_data[] |
{0, 0, 0, 0, 0, -3.025529, 3.013311, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, mPi/2.0, -0.274889, 2.168572, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.19, 0, -2.221804, 2.141519, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.139, 0, -3.551745, 0.462512, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.1473, 0, -mPi/2.0, -4.546583, 1.422443, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.036, 0, mPi/2.0, -2.085668, 3.656465, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
Definition at line 105 of file kinematics.h.
| const Real Katana6M90A_G_data[] |
{0, 0, 0, 0, 0, -3.025529, 3.013311, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, mPi/2.0, -0.274889, 2.168572, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.19, 0, -2.221804, 2.141519, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.139, 0, -3.551745, 0.462512, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.1473, 0, -mPi/2.0, -4.546583, 1.422443, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, mPi/2.0, 0.1505, 0, mPi/2.0, -3.141593, 3.141593, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1}
Definition at line 113 of file kinematics.h.
| const Real Katana6M90B_F_data[] |
{0, 0, 0, 0, 0, -3.025529, 3.013311, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, mPi/2.0, -0.274889, 2.168572, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.19, 0, -2.221804, 2.141519, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.139, 0, -3.551745, 0.462512, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.1473, 0, -mPi/2.0, -1.40499, 4.564036, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.036, 0, mPi/2.0, -2.160718, 3.721042, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
Definition at line 128 of file kinematics.h.
| const Real Katana6M90B_G_data[] |
{0, 0, 0, 0, 0, -3.025529, 3.013311, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, mPi/2.0, -0.274889, 2.168572, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.19, 0, -2.221804, 2.141519, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.139, 0, -3.551745, 0.462512, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.1473, 0, -mPi/2.0, -1.40499, 4.564036, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, mPi/2.0, 0.1505, 0, mPi/2.0, -3.141593, 3.141593, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1}
Definition at line 136 of file kinematics.h.
| const double LENGTH_MULTIPLIER = 10.0 |
Definition at line 70 of file kinematics.h.
| const double Link_length_180[] = {0.19, 0.139, 0.1473, 0.041} |
Definition at line 162 of file kinematics.h.
| const double Link_length_90A_F[] = {0.19, 0.139, 0.1473, 0.036} |
Definition at line 160 of file kinematics.h.
| const double Link_length_90A_G[] = {0.19, 0.139, 0.1473, 0.1505} |
Definition at line 161 of file kinematics.h.
| const double Link_length_90B_F[] = {0.19, 0.139, 0.1473, 0.036} |
Definition at line 163 of file kinematics.h.
| const double Link_length_90B_G[] = {0.19, 0.139, 0.1473, 0.1505} |
Definition at line 164 of file kinematics.h.
| const int MaxDof = 10 |
Definition at line 72 of file kinematics.h.
| const int Rotation_direction[] = {-1, -1, 1, 1, 1, 1} |
Rotation direction.
Definition at line 171 of file kinematics.h.