#include "ros/ros.h"#include <kdl/jntarray.hpp>#include <sensor_msgs/JointState.h>#include <brics_actuator/JointVelocities.h>#include <trajectory_msgs/JointTrajectory.h>#include <cob_srvs/Trigger.h>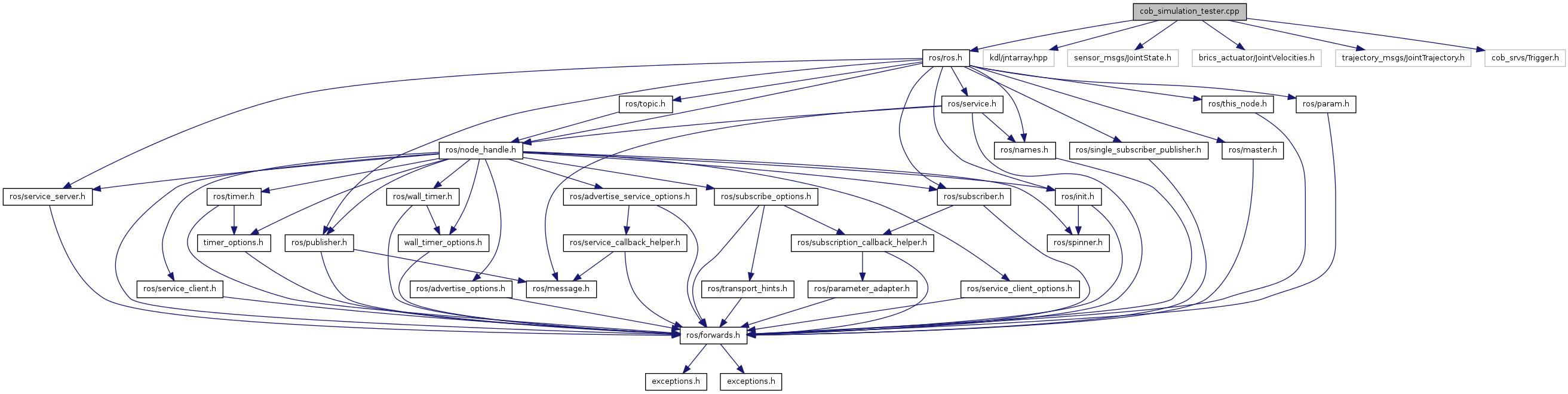
Go to the source code of this file.
Functions | |
| void | controllerStateCallback (const sensor_msgs::JointState::ConstPtr &msg) |
| int | main (int argc, char **argv) |
| JntArray | parseJointStates (std::vector< std::string > names, std::vector< double > positions) |
| bool | resetCB (cob_srvs::Trigger::Request &request, cob_srvs::Trigger::Response &response) |
| void | sendVel (JntArray q_dot) |
| void | velocityCallback (const brics_actuator::JointVelocities::ConstPtr &msg) |
Variables | |
| ros::Publisher | arm_pub_ |
| ros::Time | last |
| KDL::JntArray | q |
| KDL::JntArray | q_last |
| ros::ServiceServer | serv_reset |
| bool | started = false |
| KDL::JntArray | VirtualQ |
Function Documentation
| void controllerStateCallback | ( | const sensor_msgs::JointState::ConstPtr & | msg | ) |
Definition at line 97 of file cob_simulation_tester.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 117 of file cob_simulation_tester.cpp.
| JntArray parseJointStates | ( | std::vector< std::string > | names, |
| std::vector< double > | positions | ||
| ) |
Definition at line 59 of file cob_simulation_tester.cpp.
| bool resetCB | ( | cob_srvs::Trigger::Request & | request, |
| cob_srvs::Trigger::Response & | response | ||
| ) |
Definition at line 90 of file cob_simulation_tester.cpp.
Definition at line 24 of file cob_simulation_tester.cpp.
| void velocityCallback | ( | const brics_actuator::JointVelocities::ConstPtr & | msg | ) |
Definition at line 104 of file cob_simulation_tester.cpp.
Variable Documentation
Definition at line 19 of file cob_simulation_tester.cpp.
Definition at line 16 of file cob_simulation_tester.cpp.
Definition at line 14 of file cob_simulation_tester.cpp.
Definition at line 15 of file cob_simulation_tester.cpp.
Definition at line 20 of file cob_simulation_tester.cpp.
| bool started = false |
Definition at line 17 of file cob_simulation_tester.cpp.
Definition at line 13 of file cob_simulation_tester.cpp.