#include <organized_normal_estimation.h>
Public Types | |
| typedef pcl::PointCloud < LabelOutT > | LabelCloudOut |
| typedef LabelCloudOut::ConstPtr | LabelCloudOutConstPtr |
| typedef LabelCloudOut::Ptr | LabelCloudOutPtr |
| typedef pcl::PointCloud< PointInT > | PointCloudIn |
| typedef PointCloudIn::ConstPtr | PointCloudInConstPtr |
| typedef PointCloudIn::Ptr | PointCloudInPtr |
| typedef pcl::PointCloud < PointOutT > | PointCloudOut |
| typedef PointCloudOut::ConstPtr | PointCloudOutConstPtr |
| typedef PointCloudOut::Ptr | PointCloudOutPtr |
Public Member Functions | |
| void | computePointNormal (const PointCloudIn &cloud, int index, float &n_x, float &n_y, float &n_z, int &label_out) |
| OrganizedNormalEstimation () | |
| void | recomputeSegmentNormal (PointCloudInConstPtr cloud_in, LabelCloudOutConstPtr label_in, int index, float &n_x, float &n_y, float &n_z) |
| void | setOutputLabels (LabelCloudOutPtr labels) |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
Protected Attributes | |
| LabelCloudOutPtr | labels_ |
Detailed Description
template<typename PointInT, typename PointOutT, typename LabelOutT>
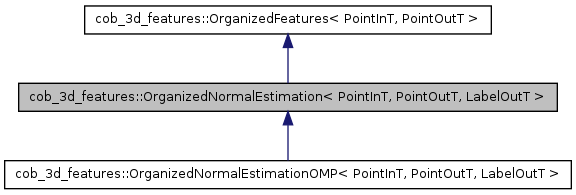
class cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >
Definition at line 80 of file organized_normal_estimation.h.
Member Typedef Documentation
| typedef pcl::PointCloud<LabelOutT> cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::LabelCloudOut |
Definition at line 103 of file organized_normal_estimation.h.
| typedef LabelCloudOut::ConstPtr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::LabelCloudOutConstPtr |
Definition at line 105 of file organized_normal_estimation.h.
| typedef LabelCloudOut::Ptr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::LabelCloudOutPtr |
Definition at line 104 of file organized_normal_estimation.h.
| typedef pcl::PointCloud<PointInT> cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudIn |
Reimplemented from cob_3d_features::OrganizedFeatures< PointInT, PointOutT >.
Definition at line 95 of file organized_normal_estimation.h.
| typedef PointCloudIn::ConstPtr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudInConstPtr |
Reimplemented from cob_3d_features::OrganizedFeatures< PointInT, PointOutT >.
Definition at line 97 of file organized_normal_estimation.h.
| typedef PointCloudIn::Ptr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudInPtr |
Reimplemented from cob_3d_features::OrganizedFeatures< PointInT, PointOutT >.
Definition at line 96 of file organized_normal_estimation.h.
| typedef pcl::PointCloud<PointOutT> cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudOut |
Reimplemented from cob_3d_features::OrganizedFeatures< PointInT, PointOutT >.
Reimplemented in cob_3d_features::OrganizedNormalEstimationOMP< PointInT, PointOutT, LabelOutT >.
Definition at line 99 of file organized_normal_estimation.h.
| typedef PointCloudOut::ConstPtr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudOutConstPtr |
Definition at line 101 of file organized_normal_estimation.h.
| typedef PointCloudOut::Ptr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::PointCloudOutPtr |
Definition at line 100 of file organized_normal_estimation.h.
Constructor & Destructor Documentation
| cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::OrganizedNormalEstimation | ( | ) | [inline] |
Definition at line 107 of file organized_normal_estimation.h.
Member Function Documentation
| void cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Implements cob_3d_features::OrganizedFeatures< PointInT, PointOutT >.
Reimplemented in cob_3d_features::OrganizedNormalEstimationOMP< PointInT, PointOutT, LabelOutT >.
Definition at line 402 of file organized_normal_estimation.hpp.
| void cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::computePointNormal | ( | const PointCloudIn & | cloud, |
| int | index, | ||
| float & | n_x, | ||
| float & | n_y, | ||
| float & | n_z, | ||
| int & | label_out | ||
| ) |
Definition at line 269 of file organized_normal_estimation.hpp.
| void cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::recomputeSegmentNormal | ( | PointCloudInConstPtr | cloud_in, |
| LabelCloudOutConstPtr | label_in, | ||
| int | index, | ||
| float & | n_x, | ||
| float & | n_y, | ||
| float & | n_z | ||
| ) |
Definition at line 141 of file organized_normal_estimation.hpp.
| void cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::setOutputLabels | ( | LabelCloudOutPtr | labels | ) | [inline] |
Definition at line 113 of file organized_normal_estimation.h.
Member Data Documentation
LabelCloudOutPtr cob_3d_features::OrganizedNormalEstimation< PointInT, PointOutT, LabelOutT >::labels_ [protected] |
Definition at line 137 of file organized_normal_estimation.h.
The documentation for this class was generated from the following files: