#include <sys/time.h>#include "c3_hlac/c3_hlac.h"#include "c3_hlac/c3_hlac_tools.h"#include <pcl_cloud_algos/pcl_cloud_algos_point_types.h>#include <pcl/point_types.h>#include <pcl/features/feature.h>#include <pcl/io/pcd_io.h>#include <pcl/features/normal_3d.h>#include <pcl/features/rsd.h>#include <vosch/vosch_tools.hpp>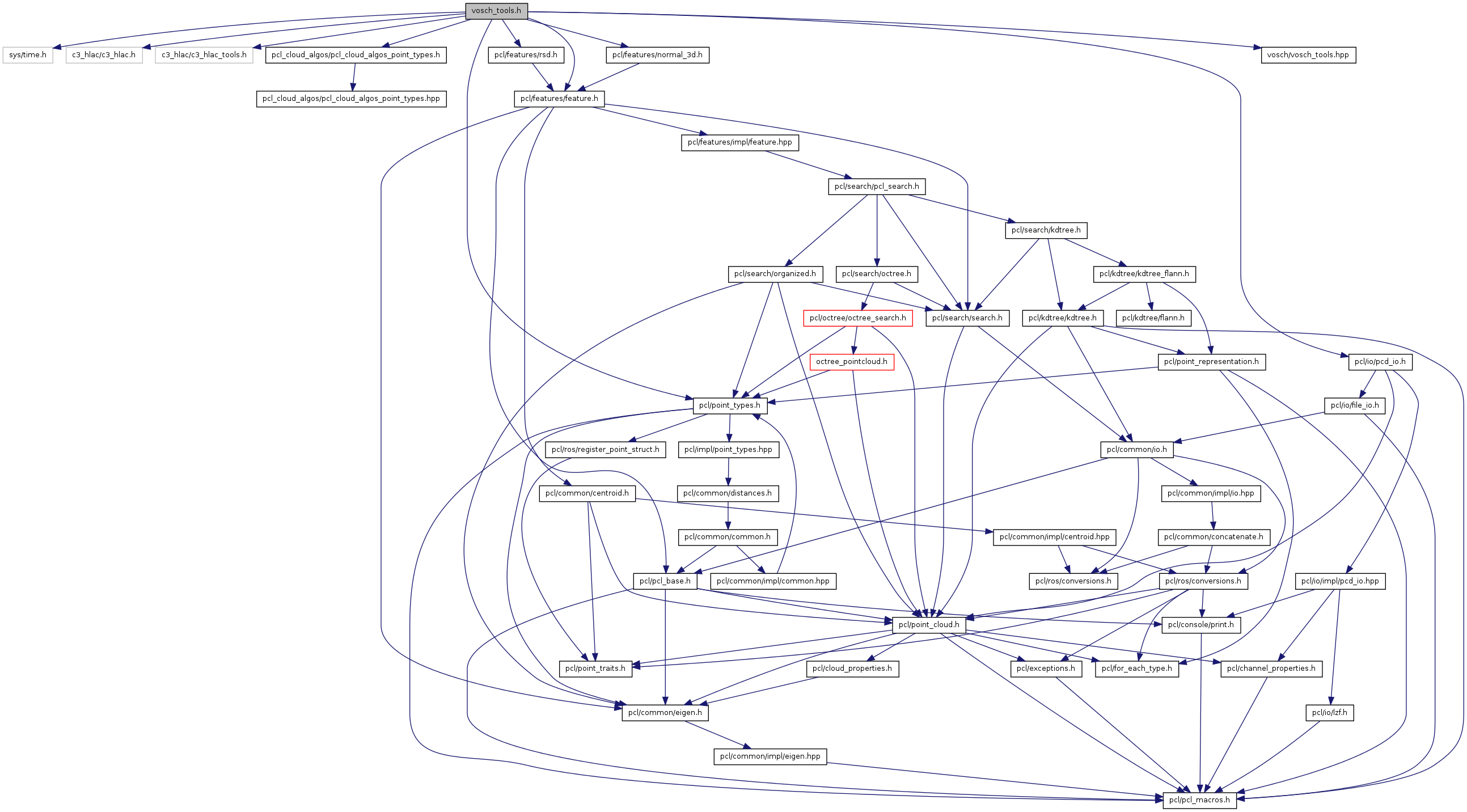
Go to the source code of this file.
Defines | |
| #define | CYLINDER 2 |
| #define | EDGE 4 |
| #define | EMPTY 5 |
| #define | NOISE 0 |
| #define | NR_CLASS 5 |
| #define | NR_DIV 7 |
| #define | PLANE 1 |
| #define | SPHERE 3 |
Functions | |
| template<typename T1 , typename T2 > | |
| void | computeNormal (pcl::PointCloud< T1 > input_cloud, pcl::PointCloud< T2 > &output_cloud) |
| compute normals | |
| const std::vector< float > | concVector (const std::vector< float > v1, const std::vector< float > v2) |
| concatenate | |
| template<typename PointT > | |
| Eigen::Vector3i | extractConVOSCH (pcl::VoxelGrid< PointT > grid, pcl::PointCloud< PointT > cloud, pcl::PointCloud< PointT > cloud_downsampled, std::vector< std::vector< float > > &feature, int color_threshold_r, int color_threshold_g, int color_threshold_b, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0, const bool is_normalize=false) |
| ConVOSCH. | |
| template<typename PointT > | |
| void | extractConVOSCH (pcl::VoxelGrid< PointT > grid, pcl::PointCloud< PointT > cloud, pcl::PointCloud< PointT > cloud_downsampled, std::vector< float > &feature, int color_threshold_r, int color_threshold_g, int color_threshold_b, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0) |
| template<typename T > | |
| Eigen::Vector3i | extractGRSDSignature21 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< std::vector< float > > &feature, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0, const bool is_normalize=false) |
| extract - GRSD - | |
| template<typename T > | |
| void | extractGRSDSignature21 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< float > &feature, const float voxel_size, const bool is_normalize=false) |
| template<typename T > | |
| Eigen::Vector3i | extractGRSDSignature325 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< std::vector< float > > &feature, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0, const bool is_normalize=false) |
| extract - rotation-variant GRSD - | |
| template<typename T > | |
| void | extractGRSDSignature325 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< float > &feature, const float voxel_size, const bool is_normalize=false) |
| template<typename T > | |
| Eigen::Vector3i | extractPlusGRSDSignature110 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< std::vector< float > > &feature, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0, const bool is_normalize=false) |
| extract - PlusGRSD - | |
| template<typename T > | |
| void | extractPlusGRSDSignature110 (pcl::VoxelGrid< T > grid, pcl::PointCloud< T > cloud, pcl::PointCloud< T > cloud_downsampled, std::vector< float > &feature, const float voxel_size, const bool is_normalize=false) |
| template<typename PointT > | |
| Eigen::Vector3i | extractVOSCH (pcl::VoxelGrid< PointT > grid, pcl::PointCloud< PointT > cloud, pcl::PointCloud< PointT > cloud_downsampled, std::vector< std::vector< float > > &feature, int color_threshold_r, int color_threshold_g, int color_threshold_b, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0, const bool is_normalize=false) |
| VOSCH. | |
| template<typename PointT > | |
| void | extractVOSCH (pcl::VoxelGrid< PointT > grid, pcl::PointCloud< PointT > cloud, pcl::PointCloud< PointT > cloud_downsampled, std::vector< float > &feature, int color_threshold_r, int color_threshold_g, int color_threshold_b, const float voxel_size, const int subdivision_size=0, const int offset_x=0, const int offset_y=0, const int offset_z=0) |
| int | getType (float min_radius, float max_radius) |
| function for GRSD | |
| template<typename T > | |
| bool | readPoints (const char *name, pcl::PointCloud< T > &cloud) |
| read | |
Variables | |
| const int | GRSD_LARGE_DIM = 325 |
| const double | max_min_radius_diff_ = 0.02 |
| const double | max_radius_noise_ = 0.050 |
| const double | min_radius_edge_ = 0.030 |
| const double | min_radius_noise_ = 0.030 |
| const double | min_radius_plane_ = 0.066 |
| const float | NORMALIZE_GRSD = 20.0 / 26 |
| const double | normals_radius_search = 0.02 |
| const double | rsd_radius_search = 0.01 |
| #define CYLINDER 2 |
Definition at line 15 of file vosch_tools.h.
| #define EDGE 4 |
Definition at line 17 of file vosch_tools.h.
| #define EMPTY 5 |
Definition at line 18 of file vosch_tools.h.
| #define NOISE 0 |
Definition at line 13 of file vosch_tools.h.
| #define NR_CLASS 5 |
Definition at line 12 of file vosch_tools.h.
| #define NR_DIV 7 |
Definition at line 20 of file vosch_tools.h.
| #define PLANE 1 |
Definition at line 14 of file vosch_tools.h.
| #define SPHERE 3 |
Definition at line 16 of file vosch_tools.h.
| void computeNormal | ( | pcl::PointCloud< T1 > | input_cloud, |
| pcl::PointCloud< T2 > & | output_cloud | ||
| ) |
compute normals
Definition at line 18 of file vosch_tools.hpp.
| const std::vector<float> concVector | ( | const std::vector< float > | v1, |
| const std::vector< float > | v2 | ||
| ) |
concatenate
Definition at line 613 of file vosch_tools.hpp.
| Eigen::Vector3i extractConVOSCH | ( | pcl::VoxelGrid< PointT > | grid, |
| pcl::PointCloud< PointT > | cloud, | ||
| pcl::PointCloud< PointT > | cloud_downsampled, | ||
| std::vector< std::vector< float > > & | feature, | ||
| int | color_threshold_r, | ||
| int | color_threshold_g, | ||
| int | color_threshold_b, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0, |
||
| const bool | is_normalize = false |
||
| ) |
ConVOSCH.
Definition at line 644 of file vosch_tools.hpp.
| void extractConVOSCH | ( | pcl::VoxelGrid< PointT > | grid, |
| pcl::PointCloud< PointT > | cloud, | ||
| pcl::PointCloud< PointT > | cloud_downsampled, | ||
| std::vector< float > & | feature, | ||
| int | color_threshold_r, | ||
| int | color_threshold_g, | ||
| int | color_threshold_b, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0 |
||
| ) |
Definition at line 657 of file vosch_tools.hpp.
| Eigen::Vector3i extractGRSDSignature21 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< std::vector< float > > & | feature, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0, |
||
| const bool | is_normalize = false |
||
| ) |
extract - GRSD -
Definition at line 71 of file vosch_tools.hpp.
| void extractGRSDSignature21 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< float > & | feature, | ||
| const float | voxel_size, | ||
| const bool | is_normalize = false |
||
| ) |
Definition at line 235 of file vosch_tools.hpp.
| Eigen::Vector3i extractGRSDSignature325 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< std::vector< float > > & | feature, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0, |
||
| const bool | is_normalize = false |
||
| ) |
extract - rotation-variant GRSD -
Definition at line 244 of file vosch_tools.hpp.
| void extractGRSDSignature325 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< float > & | feature, | ||
| const float | voxel_size, | ||
| const bool | is_normalize = false |
||
| ) |
Definition at line 390 of file vosch_tools.hpp.
| Eigen::Vector3i extractPlusGRSDSignature110 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< std::vector< float > > & | feature, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0, |
||
| const bool | is_normalize = false |
||
| ) |
extract - PlusGRSD -
Definition at line 399 of file vosch_tools.hpp.
| void extractPlusGRSDSignature110 | ( | pcl::VoxelGrid< T > | grid, |
| pcl::PointCloud< T > | cloud, | ||
| pcl::PointCloud< T > | cloud_downsampled, | ||
| std::vector< float > & | feature, | ||
| const float | voxel_size, | ||
| const bool | is_normalize = false |
||
| ) |
Definition at line 605 of file vosch_tools.hpp.
| Eigen::Vector3i extractVOSCH | ( | pcl::VoxelGrid< PointT > | grid, |
| pcl::PointCloud< PointT > | cloud, | ||
| pcl::PointCloud< PointT > | cloud_downsampled, | ||
| std::vector< std::vector< float > > & | feature, | ||
| int | color_threshold_r, | ||
| int | color_threshold_g, | ||
| int | color_threshold_b, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0, |
||
| const bool | is_normalize = false |
||
| ) |
VOSCH.
Definition at line 622 of file vosch_tools.hpp.
| void extractVOSCH | ( | pcl::VoxelGrid< PointT > | grid, |
| pcl::PointCloud< PointT > | cloud, | ||
| pcl::PointCloud< PointT > | cloud_downsampled, | ||
| std::vector< float > & | feature, | ||
| int | color_threshold_r, | ||
| int | color_threshold_g, | ||
| int | color_threshold_b, | ||
| const float | voxel_size, | ||
| const int | subdivision_size = 0, |
||
| const int | offset_x = 0, |
||
| const int | offset_y = 0, |
||
| const int | offset_z = 0 |
||
| ) |
Definition at line 635 of file vosch_tools.hpp.
function for GRSD
Definition at line 44 of file vosch_tools.hpp.
| bool readPoints | ( | const char * | name, |
| pcl::PointCloud< T > & | cloud | ||
| ) |
read
Definition at line 4 of file vosch_tools.hpp.
| const int GRSD_LARGE_DIM = 325 |
Definition at line 35 of file vosch_tools.h.
| const double max_min_radius_diff_ = 0.02 |
Definition at line 27 of file vosch_tools.h.
| const double max_radius_noise_ = 0.050 |
Definition at line 26 of file vosch_tools.h.
| const double min_radius_edge_ = 0.030 |
Definition at line 28 of file vosch_tools.h.
| const double min_radius_noise_ = 0.030 |
Definition at line 26 of file vosch_tools.h.
| const double min_radius_plane_ = 0.066 |
Definition at line 25 of file vosch_tools.h.
| const float NORMALIZE_GRSD = 20.0 / 26 |
Definition at line 34 of file vosch_tools.h.
| const double normals_radius_search = 0.02 |
Definition at line 30 of file vosch_tools.h.
| const double rsd_radius_search = 0.01 |
Definition at line 29 of file vosch_tools.h.

