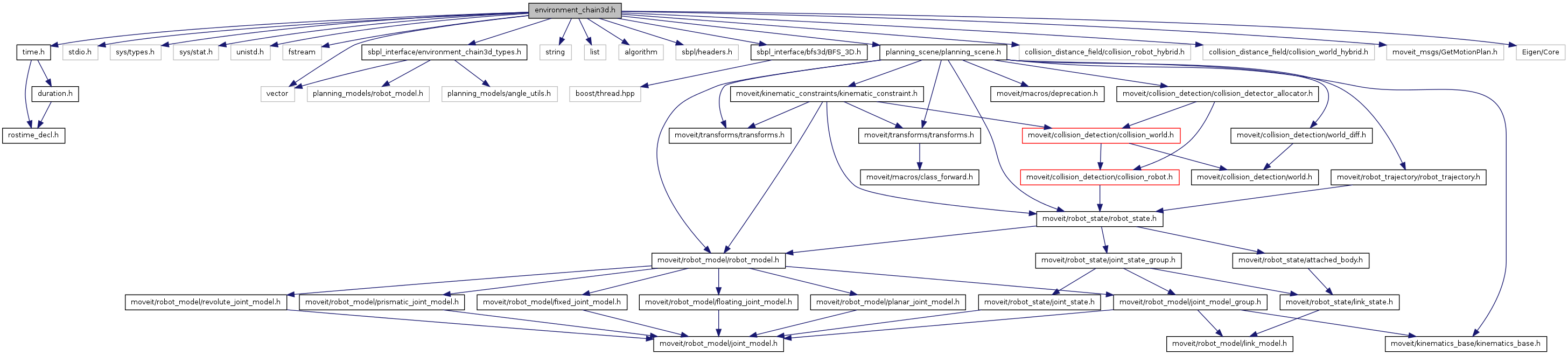
#include <time.h>#include <stdio.h>#include <sys/types.h>#include <sys/stat.h>#include <unistd.h>#include <fstream>#include <vector>#include <string>#include <list>#include <algorithm>#include <sbpl/headers.h>#include <sbpl_interface/bfs3d/BFS_3D.h>#include <planning_scene/planning_scene.h>#include <collision_distance_field/collision_robot_hybrid.h>#include <collision_distance_field/collision_world_hybrid.h>#include <sbpl_interface/environment_chain3d_types.h>#include <moveit_msgs/GetMotionPlan.h>#include <Eigen/Core>
Include dependency graph for environment_chain3d.h:
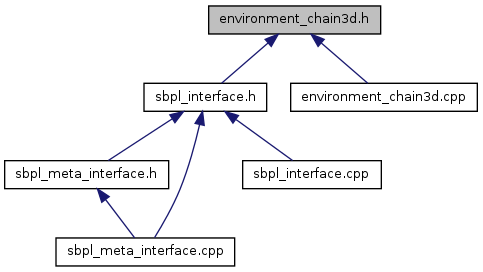
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | sbpl_interface::EnvironmentChain3D |
| struct | sbpl_interface::PlanningParameters |
| struct | sbpl_interface::PlanningStatistics |
Namespaces | |
| namespace | sbpl_interface |
Variables | |
| static const double | DEFAULT_INTERPOLATION_DISTANCE = .05 |
| static const double | DEFAULT_JOINT_MOTION_PRIMITIVE_DISTANCE = .2 |
Variable Documentation
const double DEFAULT_INTERPOLATION_DISTANCE = .05 [static] |
: Benjamin Cohen /bcohen.com, E. Gil Jones
Definition at line 56 of file environment_chain3d.h.
const double DEFAULT_JOINT_MOTION_PRIMITIVE_DISTANCE = .2 [static] |
Definition at line 57 of file environment_chain3d.h.