The Poisson surface reconstruction algorithm.
More...
#include <poisson.h>
List of all members.
Detailed Description
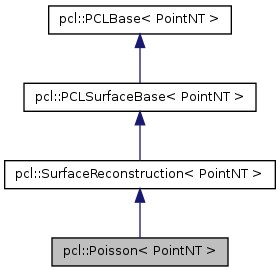
template<typename PointNT>
class pcl::Poisson< PointNT >
The Poisson surface reconstruction algorithm.
- Note:
- Code adapted from Misha Kazhdan: http://www.cs.jhu.edu/~misha/Code/PoissonRecon/
-
Based on the paper: * Michael Kazhdan, Matthew Bolitho, Hugues Hoppe, "Poisson surface reconstruction", SGP '06 Proceedings of the fourth Eurographics symposium on Geometry processing
- Author:
- Alexandru-Eugen Ichim
Definition at line 55 of file poisson.h.
Member Typedef Documentation
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
Constructor & Destructor Documentation
template<typename PointNT >
Constructor that sets all the parameters to working default values.
Definition at line 63 of file poisson.hpp.
template<typename PointNT >
Member Function Documentation
template<typename PointNT >
template<int Degree>
template<typename PointNT>
template<typename PointNT>
Get the confidence flag.
Definition at line 96 of file poisson.h.
template<typename PointNT>
Get the degree parameter.
Definition at line 197 of file poisson.h.
template<typename PointNT>
Get the depth parameter.
Definition at line 133 of file poisson.h.
template<typename PointNT>
Get the depth at which a block iso-surface extractor should be used to extract the iso-surface.
Definition at line 159 of file poisson.h.
template<typename PointNT>
Get the manifold flag.
Definition at line 108 of file poisson.h.
template<typename PointNT>
Get whether the algorithm outputs a polygon mesh or a triangle mesh.
Definition at line 119 of file poisson.h.
template<typename PointNT>
Get the minimum number of sample points that should fall within an octree node as the octree construction is adapted to sampling density.
Definition at line 174 of file poisson.h.
template<typename PointNT>
Get the ratio between the diameter of the cube used for reconstruction and the diameter of the samples' bounding cube.
Definition at line 187 of file poisson.h.
template<typename PointNT>
Get the the depth at which a block Gauss-Seidel solver is used to solve the Laplacian equation.
Definition at line 146 of file poisson.h.
template<typename PointNT>
template<typename PointNT >
template<typename PointNT>
Set the confidence flag.
- Note:
- Enabling this flag tells the reconstructor to use the size of the normals as confidence information. When the flag is not enabled, all normals are normalized to have unit-length prior to reconstruction.
- Parameters:
-
| [in] | confidence | the given flag |
Definition at line 92 of file poisson.h.
template<typename PointNT>
Set the degree parameter.
- Parameters:
-
| [in] | degree | the given degree |
Definition at line 193 of file poisson.h.
template<typename PointNT>
Set the maximum depth of the tree that will be used for surface reconstruction.
- Note:
- Running at depth d corresponds to solving on a voxel grid whose resolution is no larger than 2^d x 2^d x 2^d. Note that since the reconstructor adapts the octree to the sampling density, the specified reconstruction depth is only an upper bound.
- Parameters:
-
| [in] | depth | the depth parameter |
Definition at line 129 of file poisson.h.
template<typename PointNT>
Set the depth at which a block iso-surface extractor should be used to extract the iso-surface.
- Note:
- Using this parameter helps reduce the memory overhead at the cost of a small increase in extraction time. (In practice, we have found that for reconstructions of depth 9 or higher a subdivide depth of 7 or 8 can greatly reduce the memory usage.)
- Parameters:
-
| [in] | iso_divide | the given parameter value |
Definition at line 155 of file poisson.h.
template<typename PointNT>
Set the manifold flag.
- Note:
- Enabling this flag tells the reconstructor to add the polygon barycenter when triangulating polygons with more than three vertices.
- Parameters:
-
| [in] | manifold | the given flag |
Definition at line 104 of file poisson.h.
template<typename PointNT>
Enabling this flag tells the reconstructor to output a polygon mesh (rather than triangulating the results of Marching Cubes).
- Parameters:
-
| [in] | output_polygons | the given flag |
Definition at line 115 of file poisson.h.
template<typename PointNT>
Set the minimum number of sample points that should fall within an octree node as the octree construction is adapted to sampling density.
- Note:
- For noise-free samples, small values in the range [1.0 - 5.0] can be used. For more noisy samples, larger values in the range [15.0 - 20.0] may be needed to provide a smoother, noise-reduced, reconstruction.
- Parameters:
-
| [in] | samples_per_node | the given parameter value |
Definition at line 168 of file poisson.h.
template<typename PointNT>
Set the ratio between the diameter of the cube used for reconstruction and the diameter of the samples' bounding cube.
- Parameters:
-
| [in] | scale | the given parameter value |
Definition at line 181 of file poisson.h.
template<typename PointNT>
Set the the depth at which a block Gauss-Seidel solver is used to solve the Laplacian equation.
- Note:
- Using this parameter helps reduce the memory overhead at the cost of a small increase in reconstruction time. (In practice, we have found that for reconstructions of depth 9 or higher a subdivide depth of 7 or 8 can greatly reduce the memory usage.)
- Parameters:
-
| [in] | solver_divide | the given parameter value |
Definition at line 142 of file poisson.h.
Member Data Documentation
template<typename PointNT>
template<typename PointNT>
The point cloud input (XYZ+Normals).
Definition at line 202 of file poisson.h.
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
template<typename PointNT>
The documentation for this class was generated from the following files: