Pure abstract class. All types of meshing/reconstruction algorithms in libpcl_surface must inherit from this, in order to make sure we have a consistent API. The methods that we care about here are: More...
#include <reconstruction.h>
Public Types | |
| typedef pcl::search::Search < PointInT > | KdTree |
| typedef pcl::search::Search < PointInT >::Ptr | KdTreePtr |
Public Member Functions | |
| KdTreePtr | getSearchMethod () |
| Get a pointer to the search method used. | |
| PCLSurfaceBase () | |
| Empty constructor. | |
| virtual void | reconstruct (pcl::PolygonMesh &output)=0 |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| void | setSearchMethod (const KdTreePtr &tree) |
| Provide an optional pointer to a search object. | |
Protected Member Functions | |
| virtual std::string | getClassName () const |
| Abstract class get name method. | |
Protected Attributes | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
Detailed Description
template<typename PointInT>
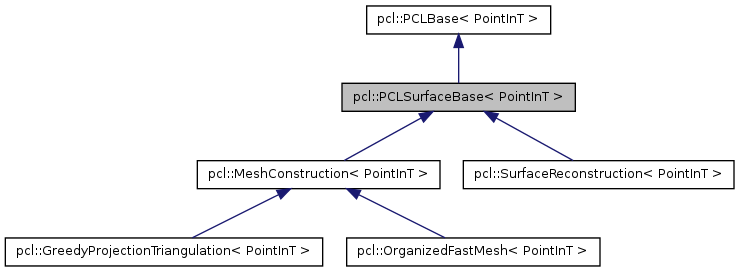
class pcl::PCLSurfaceBase< PointInT >
Pure abstract class. All types of meshing/reconstruction algorithms in libpcl_surface must inherit from this, in order to make sure we have a consistent API. The methods that we care about here are:
- setSearchMethod(&SearchPtr): passes a search locator
- reconstruct(&PolygonMesh): creates a PolygonMesh object from the input data
Definition at line 62 of file reconstruction.h.
Member Typedef Documentation
| typedef pcl::search::Search<PointInT> pcl::PCLSurfaceBase< PointInT >::KdTree |
Reimplemented in pcl::MarchingCubes< PointNT >, pcl::GreedyProjectionTriangulation< PointInT >, pcl::GridProjection< PointNT >, pcl::MarchingCubesRBF< PointNT >, pcl::MarchingCubesHoppe< PointNT >, and pcl::Poisson< PointNT >.
Definition at line 65 of file reconstruction.h.
| typedef pcl::search::Search<PointInT>::Ptr pcl::PCLSurfaceBase< PointInT >::KdTreePtr |
Reimplemented in pcl::MarchingCubes< PointNT >, pcl::GreedyProjectionTriangulation< PointInT >, pcl::GridProjection< PointNT >, pcl::MarchingCubesRBF< PointNT >, pcl::MarchingCubesHoppe< PointNT >, and pcl::Poisson< PointNT >.
Definition at line 66 of file reconstruction.h.
Constructor & Destructor Documentation
| pcl::PCLSurfaceBase< PointInT >::PCLSurfaceBase | ( | ) | [inline] |
Empty constructor.
Definition at line 69 of file reconstruction.h.
Member Function Documentation
| virtual std::string pcl::PCLSurfaceBase< PointInT >::getClassName | ( | ) | const [inline, protected, virtual] |
Abstract class get name method.
Reimplemented in pcl::GridProjection< PointNT >, pcl::MarchingCubes< PointNT >, pcl::GreedyProjectionTriangulation< PointInT >, and pcl::Poisson< PointNT >.
Definition at line 97 of file reconstruction.h.
| KdTreePtr pcl::PCLSurfaceBase< PointInT >::getSearchMethod | ( | ) | [inline] |
Get a pointer to the search method used.
Definition at line 82 of file reconstruction.h.
| virtual void pcl::PCLSurfaceBase< PointInT >::reconstruct | ( | pcl::PolygonMesh & | output | ) | [pure virtual] |
Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()>
- Parameters:
-
[out] output the resultant reconstructed surface model
Implemented in pcl::MeshConstruction< PointInT >, pcl::MeshConstruction< PointType >, pcl::SurfaceReconstruction< PointInT >, and pcl::SurfaceReconstruction< PointNT >.
| void pcl::PCLSurfaceBase< PointInT >::setSearchMethod | ( | const KdTreePtr & | tree | ) | [inline] |
Provide an optional pointer to a search object.
- Parameters:
-
[in] tree a pointer to the spatial search object.
Definition at line 75 of file reconstruction.h.
Member Data Documentation
KdTreePtr pcl::PCLSurfaceBase< PointInT >::tree_ [protected] |
A pointer to the spatial search object.
Definition at line 93 of file reconstruction.h.
The documentation for this class was generated from the following file: