#include <conditionalUniformMeasPdf1d.h>
Public Member Functions | |
| ConditionalUniformMeasPdf1d (const Gaussian &measNoise) | |
| Constructor. | |
| virtual Probability | ProbabilityGet (const MatrixWrapper::ColumnVector &measurement) const |
| Get the probability of a certain argument. | |
| virtual | ~ConditionalUniformMeasPdf1d () |
| Destructor. | |
Private Attributes | |
| Gaussian | _measNoise |
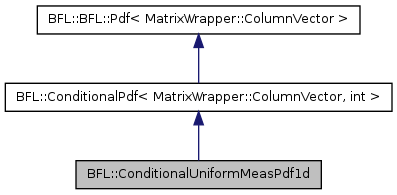
Detailed Description
Conditional Uniform Measurement Pdf for 1d mobile robot example Specific class especially created for the measurement pdf for the 1d mobile robot localisation example with a histogram filter. The measurement is direct measurement (ultrasonic sensor) of the robot's 1d position (=2*robot position). The conditional distribution takes into account some extra Gaussian measurement noise
Definition at line 36 of file conditionalUniformMeasPdf1d.h.
Constructor & Destructor Documentation
| BFL::ConditionalUniformMeasPdf1d::ConditionalUniformMeasPdf1d | ( | const Gaussian & | measNoise | ) |
Constructor.
- Parameters:
-
measNoise additiveNoise Pdf representing the extra additive noise
Definition at line 29 of file conditionalUniformMeasPdf1d.cpp.
Destructor.
Definition at line 36 of file conditionalUniformMeasPdf1d.cpp.
Member Function Documentation
| Probability BFL::ConditionalUniformMeasPdf1d::ProbabilityGet | ( | const MatrixWrapper::ColumnVector & | input | ) | const [virtual] |
Get the probability of a certain argument.
- Parameters:
-
input T argument of the Pdf
- Returns:
- the probability value of the argument
Reimplemented from BFL::BFL::Pdf< MatrixWrapper::ColumnVector >.
Definition at line 39 of file conditionalUniformMeasPdf1d.cpp.
Member Data Documentation
Definition at line 51 of file conditionalUniformMeasPdf1d.h.
The documentation for this class was generated from the following files: