#include <ros/ros.h>#include <visualization_msgs/Marker.h>#include <gazebo_plugins/ContactsState.h>#include <string>#include <boost/thread.hpp>#include <std_msgs/Float64.h>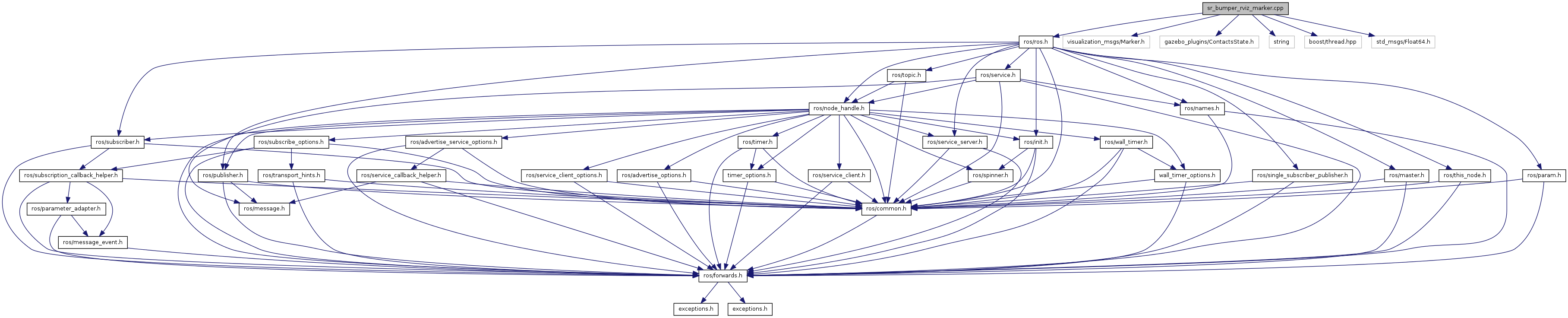
Go to the source code of this file.
Defines | |
| #define | COUNTDOWN_MAX 5 |
| #define | FF 0 |
| #define | LF 3 |
| #define | MF 1 |
| #define | RF 2 |
| #define | TH 4 |
Functions | |
| void | callback_ff (const gazebo_plugins::ContactsState &msg) |
| void | callback_lf (const gazebo_plugins::ContactsState &msg) |
| void | callback_mf (const gazebo_plugins::ContactsState &msg) |
| void | callback_rf (const gazebo_plugins::ContactsState &msg) |
| void | callback_th (const gazebo_plugins::ContactsState &msg) |
| int | main (int argc, char **argv) |
| void | publish_marker (unsigned int id, std::string framesuffix, float force) |
| void | publish_marker_special (unsigned int id, std::string framesuffix, const ::geometry_msgs::Vector3 &force, int col) |
Variables | |
| int | colors [8][3] = {{0,0,0},{1,0,0},{0,1,0},{0,0,1},{1,1,0},{1,0,1},{0,1,1},{1,1,1}} |
| int | countdown [5] = {COUNTDOWN_MAX,COUNTDOWN_MAX,COUNTDOWN_MAX,COUNTDOWN_MAX,COUNTDOWN_MAX} |
| std_msgs::Float64::_data_type | data [5] |
| ros::Publisher | marker_pub |
| uint32_t | shape = visualization_msgs::Marker::ARROW |
| ros::Subscriber | sub [5] |
| boost::mutex | update_mutex |
Define Documentation
| #define COUNTDOWN_MAX 5 |
Definition at line 13 of file sr_bumper_rviz_marker.cpp.
| #define FF 0 |
Definition at line 14 of file sr_bumper_rviz_marker.cpp.
| #define LF 3 |
Definition at line 17 of file sr_bumper_rviz_marker.cpp.
| #define MF 1 |
Definition at line 15 of file sr_bumper_rviz_marker.cpp.
| #define RF 2 |
Definition at line 16 of file sr_bumper_rviz_marker.cpp.
| #define TH 4 |
Definition at line 18 of file sr_bumper_rviz_marker.cpp.
Function Documentation
| void callback_ff | ( | const gazebo_plugins::ContactsState & | msg | ) |
Definition at line 133 of file sr_bumper_rviz_marker.cpp.
| void callback_lf | ( | const gazebo_plugins::ContactsState & | msg | ) |
Definition at line 187 of file sr_bumper_rviz_marker.cpp.
| void callback_mf | ( | const gazebo_plugins::ContactsState & | msg | ) |
Definition at line 151 of file sr_bumper_rviz_marker.cpp.
| void callback_rf | ( | const gazebo_plugins::ContactsState & | msg | ) |
Definition at line 169 of file sr_bumper_rviz_marker.cpp.
| void callback_th | ( | const gazebo_plugins::ContactsState & | msg | ) |
Definition at line 205 of file sr_bumper_rviz_marker.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 224 of file sr_bumper_rviz_marker.cpp.
| void publish_marker | ( | unsigned int | id, |
| std::string | framesuffix, | ||
| float | force | ||
| ) |
Definition at line 80 of file sr_bumper_rviz_marker.cpp.
| void publish_marker_special | ( | unsigned int | id, |
| std::string | framesuffix, | ||
| const ::geometry_msgs::Vector3 & | force, | ||
| int | col | ||
| ) |
Definition at line 30 of file sr_bumper_rviz_marker.cpp.
Variable Documentation
| int colors[8][3] = {{0,0,0},{1,0,0},{0,1,0},{0,0,1},{1,1,0},{1,0,1},{0,1,1},{1,1,1}} |
Definition at line 25 of file sr_bumper_rviz_marker.cpp.
Definition at line 28 of file sr_bumper_rviz_marker.cpp.
| std_msgs::Float64::_data_type data[5] |
Definition at line 23 of file sr_bumper_rviz_marker.cpp.
Definition at line 22 of file sr_bumper_rviz_marker.cpp.
| uint32_t shape = visualization_msgs::Marker::ARROW |
Definition at line 27 of file sr_bumper_rviz_marker.cpp.
Definition at line 21 of file sr_bumper_rviz_marker.cpp.
| boost::mutex update_mutex |
Definition at line 24 of file sr_bumper_rviz_marker.cpp.