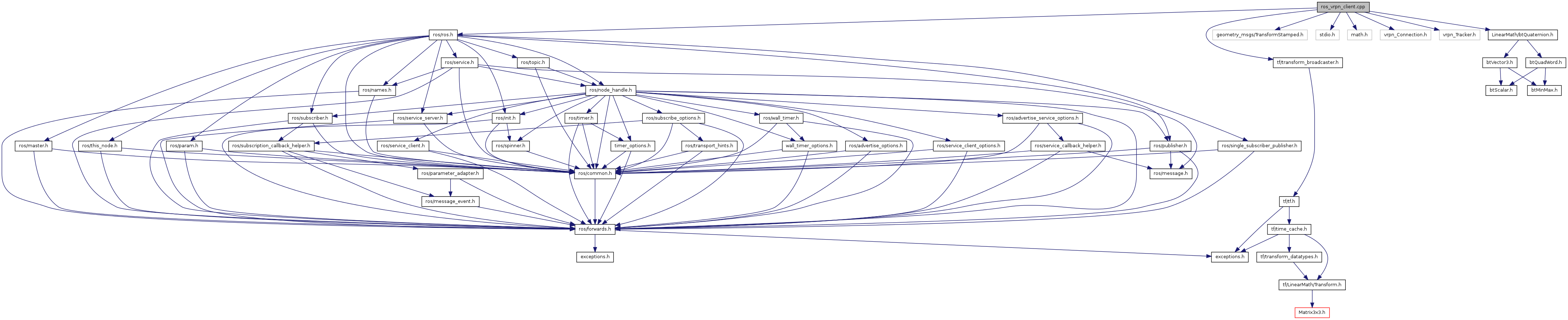
#include <ros/ros.h>#include <tf/transform_broadcaster.h>#include <geometry_msgs/TransformStamped.h>#include <stdio.h>#include <math.h>#include <vrpn_Connection.h>#include <vrpn_Tracker.h>#include <LinearMath/btQuaternion.h>
Include dependency graph for ros_vrpn_client.cpp:
Go to the source code of this file.
Classes | |
| class | Rigid_Body |
| class | TargetState |
Functions | |
| int | main (int argc, char *argv[]) |
| void VRPN_CALLBACK | track_target (void *, const vrpn_TRACKERCB t) |
Variables | |
| std::string | frame_id |
| bool | fresh_data = false |
| vrpn_TRACKERCB | prev_vrpn_data |
| TargetState * | target_state |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 142 of file ros_vrpn_client.cpp.
| void VRPN_CALLBACK track_target | ( | void * | , |
| const vrpn_TRACKERCB | t | ||
| ) |
Definition at line 96 of file ros_vrpn_client.cpp.
Variable Documentation
| std::string frame_id |
Definition at line 56 of file ros_vrpn_client.cpp.
| bool fresh_data = false |
Definition at line 59 of file ros_vrpn_client.cpp.
| vrpn_TRACKERCB prev_vrpn_data |
Definition at line 60 of file ros_vrpn_client.cpp.
Definition at line 55 of file ros_vrpn_client.cpp.